一种血管介入手术机器人分段视野控制方法及系统
本发明属于医疗机器人,具体涉及一种血管介入手术机器人分段视野控制方法及系统。
背景技术:
1、随着机器人技术的快速发展,介入手术机器人逐渐进入临床实践,成为提高手术精度、安全性和操作效率的重要辅助工具。传统的介入手术主要依赖医生的手动操作,在进行复杂的导管导航、器械操控等操作时,医生不仅需要极高的手眼协调能力,还面临着术中高强度的操作压力。医生通过手动操控导管、导丝等器械沿血管路径前进,然而在这种手动操作下,精度难以保证,特别是在细小、弯曲或复杂的血管结构中,操作难度显著增加。此外,手术时间较长且医生的疲劳感较高,导致手术安全性和效果难以完全控制。
2、现有的介入手术机器人,虽然为医生提供了一定程度的辅助,能够减轻医生的劳动强度,提升某些手术的精度,但它们仍依赖医生的实时指令和操控,无法实现任务级的自主化操作。这些机器人通常只能执行简单的自动化任务,例如辅助推动导管前进或转向等,真正复杂的手术步骤仍然需要医生的密切干预和调整。当前技术面临的一个重要瓶颈是:如何实现机器人对复杂任务的自主化执行,特别是在多任务、多段任务的情况下,能够基于环境变化自主调整操作策略,从而减轻医生负担并提高手术效率。
3、以达芬奇手术机器人为代表的外科手术机器人系统已广泛应用于多种微创外科手术中,其在技术上具备了显著的优势,其中最具代表性的技术之一便是其基于摄像系统的视野控制(field of vision, fov)功能。达芬奇机器人通过高清摄像头实时捕捉手术部位的动态影像,并为医生提供实时的高分辨率三维视图,香港中文大学机械与自动化工程学系的刘云辉教授团队在达芬奇手术机器人领域提出了基于视频特征(bin li et al.,ieee ra-l, 2022)、基于高斯混合模型(bin li et al., ieee ra-l, 2024)的fov智能控制方法,并解决了包括相机校准(fangxun zhong et al.,ieee t-ro, 2023)等技术问题。当手术器械超出当前摄像头的视野范围时,达芬奇系统能够自动调整摄像头的角度或位置,以确保手术器械始终处于医生的监视范围内。这种灵活的视野控制功能使得医生能够在操作过程中保持清晰的视野,极大地提升了手术精度和操作流畅度,为手术机器人的任务级自主化操作提供实时的视觉反馈。
4、然而,血管介入手术机器人主要依赖于dsa(数字减影血管造影)影像作为视觉反馈来源,dsa影像的成像原理决定了其视野相对固定,无法像达芬奇系统那样动态调整摄像角度或位置。在手术过程中,医生通过实时dsa影像导航介入器械(如导管、导丝)在血管内的运动,当器械超出当前dsa影像所覆盖的视野时,往往需要医生手动调整影像设备位置或重新获取影像。由于dsa设备的局限性,这种手动调控不仅增加了操作复杂度和手术时间,还容易引发手术过程中不必要的风险,例如器械进入未知区域或无法精确导航。
5、现有的血管介入手术机器人缺乏有效的fov控制功能,即缺少在手术过程中自动调整视野、重新获取影像以及任务连续性执行的能力。手术一旦超出当前影像范围,必须依赖医生的介入进行影像重新采集。这显然限制了血管介入手术机器人在自动化方面的进一步发展,同时也削弱了其在复杂手术场景中的实际应用效果。因此,亟需一种基于视野控制的自动化解决方案,能够在介入手术过程中动态监测器械的操作范围,自动处理器械超出视野的情况,并及时获取新影像,保障手术任务的连续执行。
技术实现思路
1、本发明所要解决的技术问题是:提供一种血管介入手术机器人分段视野控制方法及系统,解决了现有技术中血管介入手术机器人缺乏视野控制、无法实现复杂任务自主化操作的问题。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种血管介入手术机器人分段视野控制方法,根据预先制定的血管手术任务,将手术任务分为若干可控的操作段,每个段在当前视野内完成手术任务,每段任务结束后,自动判断是否需要切换视野,并重新开始下一段任务的执行;任务实施过程中,通过实时位置信息反馈和预设的路径规划,对手术器械进行动态控制。
4、所述血管手术任务制定时,根据dsa影像获取的血管结构和路径,自动规划导管或导丝的运动路径。
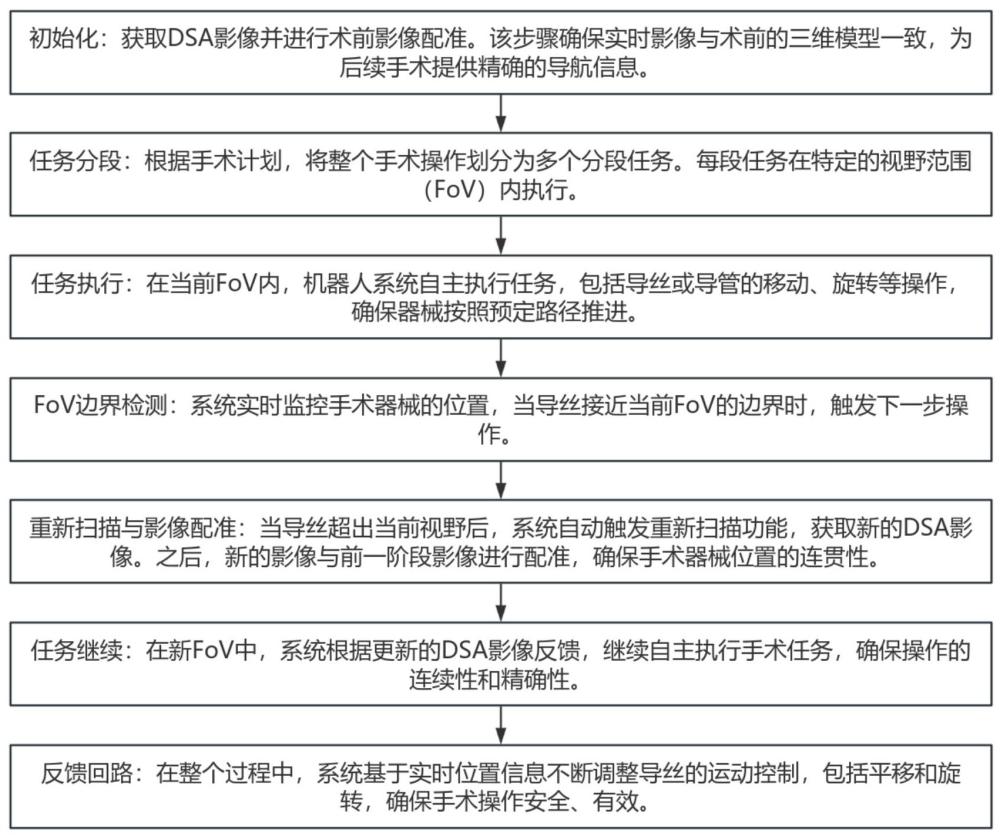
5、判断是否需要切换视野,并重新开始下一段任务执行的过程如下:
6、首先,检测手术器械的位置信息以及与视野边界的相对位置,并判断手术器械与视野边界的距离是否小于设定的阈值,如果小于,重新获取超出范围的影像;
7、其次,重新扫描新的dsa影像,覆盖当前视野外的血管区域;
8、然后,将新的dsa影像与预先存储的影像进行配准,更新当前操作环境的全貌;
9、最后,通过影像处理生成的实时位置信息,进行手术器械的运动控制,进行下一段任务的执行。
10、对手术器械进行动态控制的具体过程如下:
11、在当前的任务分段内,控制导丝或导管的平移与旋转操作,同时通过影像处理生成的实时位置信息,动态调整运动路径;然后,控制手术器械在新的运动路径下按照分段任务进行推进操作。
12、影像配准或任务执行过程中检测到异常时,手术器械自动暂停操作并发出警报,提示医生进行人工干预。
13、血管介入手术机器人分段视野控制系统,包括影像获取与处理模块、分段任务自主化模块、视野控制与重新扫描模块、影像配准与位置反馈模块、运动控制与动态调控模块;其中,
14、影像获取与处理模块,通过dsa影像系统实时获取手术区域内的血管影像,对血管路径的实时分割和建模,提取关键信息,用于dsa影像系统识别出当前视野内的血管结构;
15、分段任务自主化模块,根据dsa影像系统获取的血管结构和路径,自动规划导管或导丝的运动路径;手术器械在当前视野内按照预先规划好的路径,依次分段执行操作任务,每个分段任务执行完毕后,自动判断是否需要切换到下一个视野;
16、视野控制与重新扫描模块,当手术器械超出当前dsa影像的覆盖范围时,自动触发视野控制模块检测手术器械的位置信息以及与视野边界的相对位置,并通过控制dsa设备重新获取超出范围的影像,获取新的dsa影像,覆盖当前视野外的血管区域,将新影像与先前影像进行配准,并更新当前操作环境的全貌;
17、影像配准与位置反馈模块,在重新扫描获取的新影像中,应用影像配准算法对新旧影像进行匹配,成功配准后,生成新的位置反馈,并基于新影像中的位置信息继续后续的自动化任务操作;
18、运动控制与动态调控模块,通过实时位置信息反馈和预设的路径规划,对手术器械进行动态控制;若检测到器械偏离预定路径或出现异常情况,运动控制模块自动进行微调,同时,动态调控模块基于器械的运动反馈,实时优化任务执行路径。
19、所述dsa影像系统提取的关键信息包括血管分支点、狭窄部位。
20、所述位置反馈信息包括手术器械的平移和旋转参数,用于控制手术器械的导航。
21、所述影像配准算法基于标志性解剖结构或血管壁轮廓特征进行匹配,成功配准后,生成新的位置反馈,并基于新影像中的位置信息继续后续的自动化任务操作。
22、所述异常情况包括影像配准失败、器械偏离路径、血管壁接触。
23、与现有技术相比,本发明具有以下有益效果:
24、1、系统在每个有限的视野(fov)内自主执行一段任务操作,机器人根据实时dsa影像和预先规划的路径,自动完成导管或导丝的移动、旋转等复杂操作。当器械超出当前视野范围时,系统会自动触发重新扫描模块,获取新的dsa影像,并与术前影像或当前操作影像进行配准(registration),从而更新当前手术视野。通过这种方式,系统能够在不同的视野段之间实现任务的连续自主化操作,无需医生频繁干预。
25、2、将手术任务分为若干可控的操作段,每个段在当前视野内自主完成。每段任务结束后,系统自动判断是否需要切换视野,并重新开始下一段任务的执行。这样的操作不仅确保了手术器械始终在血管路径内精确移动,还极大减少了手术中的中断现象,提升了手术的自动化水平和操作效率。
26、3、通过分段视野控制实现血管介入手术机器人任务级自主化的操作方法,可应用于复杂血管介入手术的自动化执行。
技术研发人员:齐鹏,姚天亮
技术所有人:同济大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除