眼部按摩器的智能控制方法及装置、存储介质与流程
本发明涉及按摩设备领域,具体而言,涉及一种眼部按摩器的智能控制方法及装置、存储介质。
背景技术:
1、相关技术中,眼动训练设备都是直接进入视觉引导训练,由于目前普遍存在用眼过度的情况,如果在一些眼部肌肉过于紧张的情况下,进行视觉引导训练,会对眼部肌肉造成不可逆转的损伤,用户自己是难以确定什么状态可以进行视觉训练,什么状态不可以视觉训练,因此现在的眼动训练设备也增加了一定的使用难度。
2、另外,相关技术中的眼动追踪技术主要依赖于摄像头或红外光学传感器,但存在体积大、成本高、易受环境光线影响等问题,也会导致不准确的缺陷。
3、针对相关技术中存在的上述问题,暂未发现高效且准确的解决方案。
技术实现思路
1、本发明提供了一种眼部按摩器的智能控制方法及装置、存储介质,以解决相关技术中存在的上述技术问题。
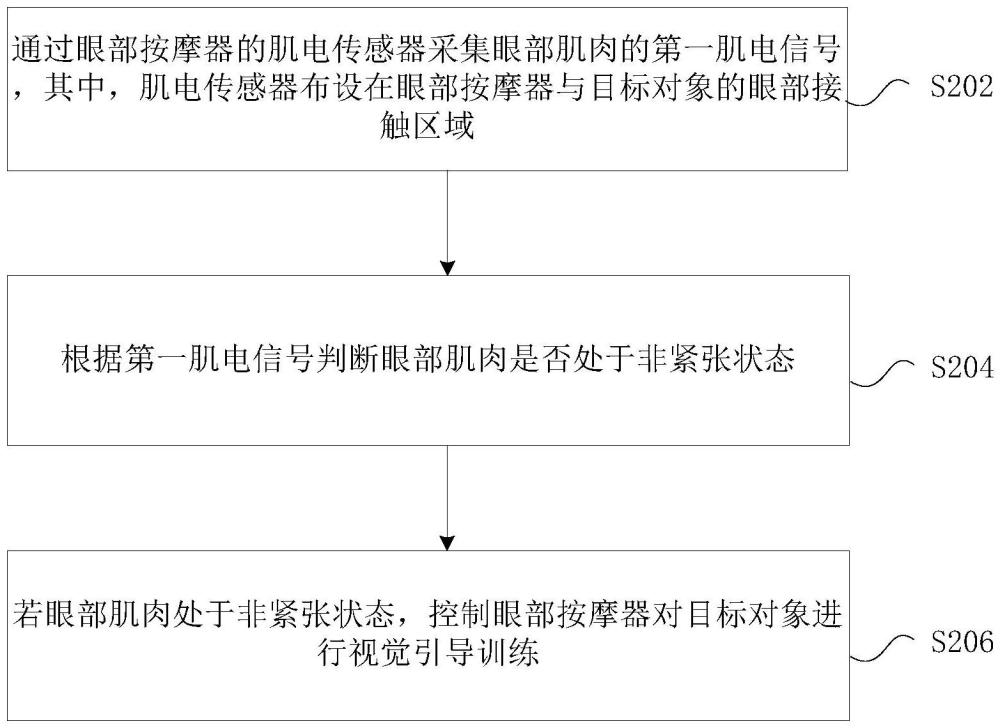
2、根据本发明的一个实施例,提供了一种眼部按摩器的智能控制方法,包括:通过眼部按摩器的肌电传感器采集眼部肌肉的第一肌电信号,其中,所述肌电传感器布设在所述眼部按摩器与目标对象的眼部接触区域;根据所述第一肌电信号判断所述眼部肌肉是否处于非紧张状态;若所述眼部肌肉处于非紧张状态,控制所述眼部按摩器对所述目标对象进行视觉引导训练。
3、可选地,在根据所述肌电信号判断所述眼部肌肉是否处于非紧张状态之后,所述方法还包括:若所述眼部肌肉处于紧张状态,控制所述眼部按摩器启动按摩模式,以对所述眼部肌肉进行按摩;在所述眼部按摩器在按摩模式运行预设时间之后,通过眼部按摩器的肌电传感器采集眼部肌肉的第二肌电信号;根据所述第二肌电信号判断所述眼部肌肉是否处于非紧张状态;若所述眼部肌肉处于非紧张状态,控制所述眼部按摩器对所述目标对象进行视觉引导训练。
4、可选地,控制所述眼部按摩器对所述目标对象进行视觉引导训练包括:确定所述目标对象的实际视场角度,通过眼部按摩器的肌电传感器实时采集眼部肌肉的第三肌电信号;根据所述第三肌电信号计算所述目标对象的眼球运动信息;根据所述实际视场角度和所述眼球运动信息计算视觉引导训练的完成度。
5、可选地,确定所述目标对象的实际视场角度包括:控制头显屏幕上的视标从屏幕中央的基准位置移动至屏幕边缘,并采集所述目标对象的眼球动态捕捉所述视标时的极限移动位置,其中,所述极限移动位置包括水平极限位置和垂直极限位置;基于所述极限移动位置计算所述目标对象的实际视场角度。
6、可选地,基于所述极限移动位置计算所述目标对象的实际视场角度包括:确定所述目标对象的眼球到所述头显屏幕的屏幕间距;采用以下公式计算所述目标对象的实际视场角度α=arctan(δx/d);其中,d为所述屏幕间距,δx=x1-x2,x1为所述极限移动位置,x2为所述基准位置。
7、可选地,根据所述第三肌电信号计算所述目标对象的眼球运动信息包括:提取所述第三肌电信号的时域特征和频域特征;采用所述时域特征和所述频域特征组合成特征向量;将所述特征向量输入预训练的眼动预测模型,输出所述目标对象的注视坐标;基于所述注视坐标计算所述目标对象的眼球运动方向,其中,所述眼球运动信息包括所述眼球运动方向。
8、可选地,基于所述注视坐标计算所述目标对象的眼球运动方向包括:确定所述眼动预测模型的模型视场角的水平半径rh和垂直半径rv,以及确定所述注视坐标在所述模型视场角的水平视场角θh和垂直视场角θv;采用以下公式分别计算水平转动角度αh和垂直转动角度αv:其中,所述注视坐标为(xi,yi),所述眼球运动方向包括所述水平转动角度和所述垂直转动角度。
9、可选地,根据所述实际视场角度和所述眼球运动信息计算视觉引导训练的完成度包括:基于所述实际视场角度将所述眼球运动信息转换为世界坐标系下的眼球标准坐标;基于训练周期内的多组眼球标准坐标拟合生成眼球运动轨迹;计算所述眼球运动轨迹相对视觉引导轨迹的偏移度;基于所述偏移度计算所述视觉引导训练的完成度,其中,所述完成度与所述偏移度呈负相关。
10、根据本发明的另一个实施例,提供了一种眼部按摩器的智能控制装置,包括:第一采集模块,用于通过眼部按摩器的肌电传感器采集眼部肌肉的第一肌电信号,其中,所述肌电传感器布设在所述眼部按摩器与目标对象的眼部接触区域;第一判断模块,用于根据所述第一肌电信号判断所述眼部肌肉是否处于非紧张状态;第一控制模块,用于若所述眼部肌肉处于非紧张状态,控制所述眼部按摩器对所述目标对象进行视觉引导训练。
11、可选地,所述装置还包括:第二控制模块,用于在所述第一判断模块根据所述肌电信号判断所述眼部肌肉是否处于非紧张状态之后,若所述眼部肌肉处于紧张状态,控制所述眼部按摩器启动按摩模式,以对所述眼部肌肉进行按摩;第二采集模块,用于在所述眼部按摩器在按摩模式运行预设时间之后,通过眼部按摩器的肌电传感器采集眼部肌肉的第二肌电信号;第二判断模块,用于根据所述第二肌电信号判断所述眼部肌肉是否处于非紧张状态;第三控制模块,用于若所述眼部肌肉处于非紧张状态,控制所述眼部按摩器对所述目标对象进行视觉引导训练。
12、可选地,所述第一控制模块包括:确定单元,用于确定所述目标对象的实际视场角度,通过眼部按摩器的肌电传感器实时采集眼部肌肉的第三肌电信号;第一计算单元,用于根据所述第三肌电信号计算所述目标对象的眼球运动信息;第二计算单元,用于根据所述实际视场角度和所述眼球运动信息计算视觉引导训练的完成度。
13、可选地,所述确定单元包括:控制子单元,用于控制头显屏幕上的视标从屏幕中央的基准位置移动至屏幕边缘,并采集所述目标对象的眼球动态捕捉所述视标时的极限移动位置,其中,所述极限移动位置包括水平极限位置和垂直极限位置;计算子单元,用于基于所述极限移动位置计算所述目标对象的实际视场角度。
14、所述计算子单元还用于:确定所述目标对象的眼球到所述头显屏幕的屏幕间距;采用以下公式计算所述目标对象的实际视场角度α:α=arctan(δx/d);其中,d为所述屏幕间距,δx=x1-x2,x1为所述极限移动位置,x2为所述基准位置。
15、可选地,所述第一计算单元包括:提取子单元,用于提取所述第三肌电信号的时域特征和频域特征;组合子单元,用于采用所述时域特征和所述频域特征组合成特征向量;输出子单元,用于将所述特征向量输入预训练的眼动预测模型,输出所述目标对象的注视坐标;计算子单元,用于基于所述注视坐标计算所述目标对象的眼球运动方向,其中,所述眼球运动信息包括所述眼球运动方向。
16、可选地,所述计算子单元还用于:确定所述眼动预测模型的模型视场角的水平半径rh和垂直半径rv,以及确定所述注视坐标在所述模型视场角的水平视场角θh和垂直视场角θv;采用以下公式分别计算水平转动角度αh和垂直转动角度αv:其中,所述注视坐标为(xi,yi),所述眼球运动方向包括所述水平转动角度和所述垂直转动角度。
17、可选地,所述第二计算单元包括:转换子单元,用于基于所述实际视场角度将所述眼球运动信息转换为世界坐标系下的眼球标准坐标;生成子单元,用于基于训练周期内的多组眼球标准坐标拟合生成眼球运动轨迹;第一计算子单元,用于计算所述眼球运动轨迹相对视觉引导轨迹的偏移度;第二计算子单元,用于基于所述偏移度计算所述视觉引导训练的完成度,其中,所述完成度与所述偏移度呈负相关。
18、根据本发明的又一个实施例,还提供了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项装置实施例中的步骤。
19、根据本发明的又一个实施例,还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项装置实施例中的步骤。
20、通过本发明实施例,通过眼部按摩器的肌电传感器采集眼部肌肉的第一肌电信号,其中,肌电传感器布设在眼部按摩器与目标对象的眼部接触区域;根据第一肌电信号判断眼部肌肉是否处于非紧张状态;若眼部肌肉处于非紧张状态,控制眼部按摩器对目标对象进行视觉引导训练,在采用眼部按摩器对所述目标对象进行视觉引导训练之前,先通过第一肌电信号判断所述眼部肌肉是否处于非紧张状态,解决了相关技术中眼部按摩器容易对眼部肌肉造成损伤的技术问题,提高了眼部按摩器的安全性。
技术研发人员:边国龙,任立隆
技术所有人:深圳市倍轻松科技股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除