脊髓电极推进植入手术机器人
本发明涉及医疗器械领域,特别是涉及一种脊髓电极推进植入手术机器人。
背景技术:
1、脊髓电刺激疗法是一种通过在椎管硬膜外腔植入电极,将电极植入到疼痛对应的神经部位,利用微弱的脉冲电流刺激脊髓神经,阻断痛觉神经刺激的传导,从而有效缓解慢性顽固性疼痛的医学疗法。同时,该疗法还可以用于修复受损的感觉神经,改善患者的肌肉痉挛、痉挛性疼痛、下肢缺血等症状。该疗法创伤小,不损伤神经组织,并发症少,并且可通过术后调控以获得最佳的治疗效果。
2、目前该疗法存在以下两点问题。第一,在现阶段的手术过程中需要医生亲自穿入电极,由于长时间的固定姿势操作,会导致医生的体力、注意力以及操作稳定性出现较快的下降,从而导致手术精度降低。第二,在手术过程中需要持续通过x射线对电极在人体的位置进行准确的定位,长期的电离辐射会对医生身体造成损伤。
技术实现思路
1、为解决以上技术问题,本发明提供一种脊髓电极推进植入手术机器人,提高了手术的效率和准确性,并且降低了x光射线辐射对医生产生的伤害。
2、为实现上述目的,本发明提供了如下方案:
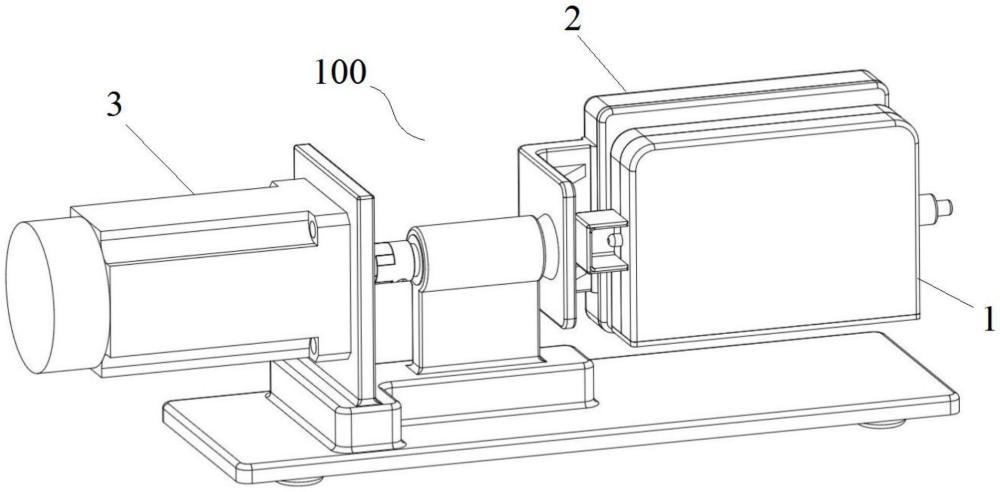
3、本发明提供一种脊髓电极推进植入手术机器人,包括旋转装置、传动装置和一次性传动耗材,所述传动装置包括旋转轴、第一壳体和驱动机构,所述旋转装置用于驱动所述旋转轴转动,所述旋转轴与所述第一壳体的一端连接,所述驱动机构设置于所述第一壳体中;所述一次性传动耗材包括第二壳体、第一安装架、第二安装架、主动带式传动机构、从动带式传动机构和弹性机构,所述第二壳体能够拆卸地安装于所述第一壳体的前侧,所述第一安装架固定于所述第二壳体中的上部,所述主动带式传动机构设置于所述第一安装架中,所述第二安装架位于所述第二壳体中的下部,且下端通过所述弹性机构与所述第二壳体的底面连接,所述从动带式传动机构设置于所述第二安装架上,所述第二壳体的两端分别设置有供电极进入的电极入口和供电极伸出的电极出口,所述电极入口位于靠近所述旋转轴的一侧,所述主动带式传动机构和所述从动带式传动机构能够相接触进而夹紧所述电极,所述驱动机构用于驱动所述主动带式传动机构运动。
4、优选地,所述一次性传动耗材还包括入口导向管和出口导向管,所述入口导向管设置于所述电极入口中,所述入口导向管的两端分别位于所述第二壳体的外部和内部,所述出口导向管设置于所述电极出口中,所述出口导向管的两端分别位于所述第二壳体的内部和外部,所述入口导向管、所述出口导向管和所述旋转轴的中心轴线共线设置。
5、优选地,所述一次性传动耗材还包括电极挡板,所述电极挡板设置于所述第二壳体设置有所述电极入口一端的外部,所述电极挡板罩设于所述入口导向管上,且所述电极挡板具有朝向前侧设置的开口。
6、优选地,所述第一壳体包括第一前壳、第一后壳和连接板,所述第一后壳的一端通过所述连接板与所述旋转轴连接,所述第一前壳安装于所述第一后壳的前侧,所述驱动机构安装于所述第一前壳的后侧,所述第二壳体能够拆卸地安装于所述第一前壳的前侧。
7、优选地,所述第二壳体包括底壳、第二前壳和第二后壳,所述第二前壳和所述第二后壳的下部均安装于所述底壳上,且所述第二前壳安装于所述第二后壳的前侧,所述第二前壳的两端分别设置有第一入口半圆孔和第一出口半圆孔,所述第二后壳的两端分别设置有第二入口半圆孔和第二出口半圆孔,所述第一入口半圆孔和所述第二入口半圆孔对接后形成所述电极入口,所述第一出口半圆孔和所述第二出口半圆孔对接后形成所述电极出口;所述弹性机构的下端与所述底壳的上部连接;所述第二后壳的后侧设置有多个卡扣,所述第一前壳的前侧设置有多个与所述卡扣结构相匹配的卡槽。
8、优选地,所述主动带式传动机构包括主动传动带、两个主动安装轴和两个主动带轮,两个所述主动安装轴沿所述第二壳体的长度方向依次转动安装于所述第一安装架上,各所述主动安装轴的后端均穿过所述第二后壳伸至外部,各所述主动带轮均固定套设于一个所述主动安装轴上,所述主动传动带绕设于两个所述主动带轮上,所述驱动机构用于驱动两个所述主动安装轴转动。
9、优选地,所述驱动机构包括第一固定板、传动电机、第一联轴器、传动蜗杆、主动转轴、主动蜗轮、中间转轴、中间蜗轮、从动转轴和从动蜗轮,所述第一固定板设置于所述第一前壳的后侧,所述传动电机设置于所述第一固定板上,所述传动电机的动力输出轴通过所述第一联轴器与所述传动蜗杆连接,所述主动蜗轮通过所述主动转轴转动安装于所述第一前壳的后侧,所述中间蜗轮通过所述中间转轴转动安装于所述第一前壳的后侧,所述从动蜗轮通过所述从动转轴转动安装于所述第一前壳的后侧,所述传动蜗杆与所述主动蜗轮相啮合,所述中间蜗轮与所述主动蜗轮相啮合,所述从动蜗轮与所述中间蜗轮相啮合,所述从动蜗轮和所述主动蜗轮的齿数相同,所述主动转轴的前端穿过所述第一前壳伸至外部,且所述主动转轴的前端设置有第一对接槽,所述从动转轴的前端穿过所述第一前壳伸至外部,且所述从动转轴的前端设置有第二对接槽;各所述主动安装轴伸至所述第二后壳外部的一端均设置有一个对接件,一个所述对接件用于插入所述第一对接槽中,进而使得所述主动转轴能够带动一个所述主动安装轴转动,另一个所述对接件用于插入所述第二对接槽中,进而使得所述从动转轴能够带动另一个所述主动安装轴转动。
10、优选地,所述第二壳体还包括两个l形板,两个所述l形板对称设置于所述第二后壳的前侧,且两个所述l形板之间形成竖向限位槽,所述第二安装架滑动安装于所述竖向限位槽中,所述从动带式传动机构包括从动传动带、两个从动安装轴和两个从动带轮,两个所述从动安装轴沿所述第二壳体的长度方向依次转动安装于所述第二安装架上,各所述从动带轮均固定套设于一个所述从动安装轴上,所述从动传动带绕设于两个所述从动带轮上。
11、优选地,所述弹性机构包括多个弹簧,各所述弹簧的上下两端均分别与所述第二安装架的下部和所述底壳的上部连接。
12、优选地,所述旋转装置包括基座、旋转电机、第二固定板、第二联轴器、立板和中空轴,所述第二固定板和所述立板均设置于所述基座上,所述中空轴设置于所述立板的上部,所述旋转轴转动安装于所述中空轴中,所述旋转电机设置于所述第二固定板上,所述旋转电机的动力输出轴通过所述第二联轴器与所述旋转轴远离所述第一壳体的一端连接。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明的脊髓电极推进植入手术机器人,主动带式传动机构和从动带式传动机构能够相接触进而夹紧电极,驱动机构驱动主动带式传动机构运动,进而能够实现电极的夹紧、前进和后退,通过旋转装置能够带动传动装置和一次性传动耗材旋转,进而能够实现电极的旋转。相比于人工手动操作有着更加良好的精度,同时不会产生手术时由于医生长时间保持固定姿势从而导致体力下降,操作出现失误的情况,提高了手术的效率和操作简便程度。本发明中能够对驱动机构和旋转装置进行远程控制,通过远程控制的方式进行操作,可以使得医生在操作的过程中远离手术台,从而降低手术过程中的x光射线辐射对医生产生的伤害。
技术特征:
1.一种脊髓电极推进植入手术机器人,其特征在于,包括旋转装置、传动装置和一次性传动耗材,所述传动装置包括旋转轴、第一壳体和驱动机构,所述旋转装置用于驱动所述旋转轴转动,所述旋转轴与所述第一壳体的一端连接,所述驱动机构设置于所述第一壳体中;所述一次性传动耗材包括第二壳体、第一安装架、第二安装架、主动带式传动机构、从动带式传动机构和弹性机构,所述第二壳体能够拆卸地安装于所述第一壳体的前侧,所述第一安装架固定于所述第二壳体中的上部,所述主动带式传动机构设置于所述第一安装架中,所述第二安装架位于所述第二壳体中的下部,且下端通过所述弹性机构与所述第二壳体的底面连接,所述从动带式传动机构设置于所述第二安装架上,所述第二壳体的两端分别设置有供电极进入的电极入口和供电极伸出的电极出口,所述电极入口位于靠近所述旋转轴的一侧,所述主动带式传动机构和所述从动带式传动机构能够相接触进而夹紧所述电极,所述驱动机构用于驱动所述主动带式传动机构运动。
2.根据权利要求1所述的脊髓电极推进植入手术机器人,其特征在于,所述一次性传动耗材还包括入口导向管和出口导向管,所述入口导向管设置于所述电极入口中,所述入口导向管的两端分别位于所述第二壳体的外部和内部,所述出口导向管设置于所述电极出口中,所述出口导向管的两端分别位于所述第二壳体的内部和外部,所述入口导向管、所述出口导向管和所述旋转轴的中心轴线共线设置。
3.根据权利要求2所述的脊髓电极推进植入手术机器人,其特征在于,所述一次性传动耗材还包括电极挡板,所述电极挡板设置于所述第二壳体设置有所述电极入口一端的外部,所述电极挡板罩设于所述入口导向管上,且所述电极挡板具有朝向前侧设置的开口。
4.根据权利要求1所述的脊髓电极推进植入手术机器人,其特征在于,所述第一壳体包括第一前壳、第一后壳和连接板,所述第一后壳的一端通过所述连接板与所述旋转轴连接,所述第一前壳安装于所述第一后壳的前侧,所述驱动机构安装于所述第一前壳的后侧,所述第二壳体能够拆卸地安装于所述第一前壳的前侧。
5.根据权利要求4所述的脊髓电极推进植入手术机器人,其特征在于,所述第二壳体包括底壳、第二前壳和第二后壳,所述第二前壳和所述第二后壳的下部均安装于所述底壳上,且所述第二前壳安装于所述第二后壳的前侧,所述第二前壳的两端分别设置有第一入口半圆孔和第一出口半圆孔,所述第二后壳的两端分别设置有第二入口半圆孔和第二出口半圆孔,所述第一入口半圆孔和所述第二入口半圆孔对接后形成所述电极入口,所述第一出口半圆孔和所述第二出口半圆孔对接后形成所述电极出口;所述弹性机构的下端与所述底壳的上部连接;所述第二后壳的后侧设置有多个卡扣,所述第一前壳的前侧设置有多个与所述卡扣结构相匹配的卡槽。
6.根据权利要求5所述的脊髓电极推进植入手术机器人,其特征在于,所述主动带式传动机构包括主动传动带、两个主动安装轴和两个主动带轮,两个所述主动安装轴沿所述第二壳体的长度方向依次转动安装于所述第一安装架上,各所述主动安装轴的后端均穿过所述第二后壳伸至外部,各所述主动带轮均固定套设于一个所述主动安装轴上,所述主动传动带绕设于两个所述主动带轮上,所述驱动机构用于驱动两个所述主动安装轴转动。
7.根据权利要求6所述的脊髓电极推进植入手术机器人,其特征在于,所述驱动机构包括第一固定板、传动电机、第一联轴器、传动蜗杆、主动转轴、主动蜗轮、中间转轴、中间蜗轮、从动转轴和从动蜗轮,所述第一固定板设置于所述第一前壳的后侧,所述传动电机设置于所述第一固定板上,所述传动电机的动力输出轴通过所述第一联轴器与所述传动蜗杆连接,所述主动蜗轮通过所述主动转轴转动安装于所述第一前壳的后侧,所述中间蜗轮通过所述中间转轴转动安装于所述第一前壳的后侧,所述从动蜗轮通过所述从动转轴转动安装于所述第一前壳的后侧,所述传动蜗杆与所述主动蜗轮相啮合,所述中间蜗轮与所述主动蜗轮相啮合,所述从动蜗轮与所述中间蜗轮相啮合,所述从动蜗轮和所述主动蜗轮的齿数相同,所述主动转轴的前端穿过所述第一前壳伸至外部,且所述主动转轴的前端设置有第一对接槽,所述从动转轴的前端穿过所述第一前壳伸至外部,且所述从动转轴的前端设置有第二对接槽;各所述主动安装轴伸至所述第二后壳外部的一端均设置有一个对接件,一个所述对接件用于插入所述第一对接槽中,进而使得所述主动转轴能够带动一个所述主动安装轴转动,另一个所述对接件用于插入所述第二对接槽中,进而使得所述从动转轴能够带动另一个所述主动安装轴转动。
8.根据权利要求5所述的脊髓电极推进植入手术机器人,其特征在于,所述第二壳体还包括两个l形板,两个所述l形板对称设置于所述第二后壳的前侧,且两个所述l形板之间形成竖向限位槽,所述第二安装架滑动安装于所述竖向限位槽中,所述从动带式传动机构包括从动传动带、两个从动安装轴和两个从动带轮,两个所述从动安装轴沿所述第二壳体的长度方向依次转动安装于所述第二安装架上,各所述从动带轮均固定套设于一个所述从动安装轴上,所述从动传动带绕设于两个所述从动带轮上。
9.根据权利要求5所述的脊髓电极推进植入手术机器人,其特征在于,所述弹性机构包括多个弹簧,各所述弹簧的上下两端均分别与所述第二安装架的下部和所述底壳的上部连接。
10.根据权利要求1所述的脊髓电极推进植入手术机器人,其特征在于,所述旋转装置包括基座、旋转电机、第二固定板、第二联轴器、立板和中空轴,所述第二固定板和所述立板均设置于所述基座上,所述中空轴设置于所述立板的上部,所述旋转轴转动安装于所述中空轴中,所述旋转电机设置于所述第二固定板上,所述旋转电机的动力输出轴通过所述第二联轴器与所述旋转轴远离所述第一壳体的一端连接。
技术总结
本发明公开了一种脊髓电极推进植入手术机器人,涉及医疗器械领域,包括旋转装置、传动装置和一次性传动耗材,传动装置包括旋转轴、第一壳体和驱动机构,一次性传动耗材包括第二壳体、第一安装架、第二安装架、主动带式传动机构、从动带式传动机构和弹性机构,主动带式传动机构设置于第一安装架中,从动带式传动机构设置于第二安装架上,第二壳体的两端分别设置有供电极进入的电极入口和供电极伸出的电极出口,主动带式传动机构和从动带式传动机构能够相接触进而夹紧电极,驱动机构用于驱动主动带式传动机构运动。该脊髓电极推进植入手术机器人提高了手术的效率和准确性,并且降低了X光射线辐射对医生产生的伤害。
技术研发人员:潘晴,张家傲,陈超,江兴华,李毅波,黄明辉
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/12/10
技术研发人员:潘晴,张家傲,陈超,江兴华,李毅波,黄明辉
技术所有人:中南大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除