一种自动拆螺栓机器人的制作方法
本发明涉及拆螺栓,尤其涉及一种自动拆螺栓机器人。
背景技术:
1、衬板能够对球磨机内壁进行保护,降低磨球对球磨机本体的磨损,衬板在工作一定时间后需要拆卸更换,球磨机衬板是通过螺栓安装于球磨机表面的。
2、球磨机衬板质量较大,需要通过大尺寸的螺栓进行拆卸安装,该类型的螺栓表面的螺母需要通过螺栓冲进行拆卸、安装,由于螺栓冲质量大,传统的螺栓冲拆卸安装螺栓是工作人员手扶螺栓冲半自动进行操作的。
3、通过设计自动拆螺栓机械人能够对螺栓冲的位置进行自动调整,能够自动对准球磨机表面的螺母,实现自动的拆装,无需人工手扶螺栓冲,提高了拆螺栓工作的效率以及稳定性;但是,受限于螺栓冲末端的结构,其难以对多个螺母进行存储,在单个螺母拆除后,需要工作人员手动伸入螺栓冲的冲击末端将单个螺母取出;导致了拆螺栓工作效率依然受到限制,无法实现完全的自动化。
技术实现思路
1、针对上述问题,本发明提供一种自动拆螺栓机器人,该发明实现了拆螺栓、取螺母的全自动化操作,极大地提高了拆螺栓工作的效率,保证了工作人员的安全性。
2、为解决上述问题,本发明所采用的技术方案是:
3、一种自动拆螺栓机器人,包括行走主体以及螺栓冲,行走主体上端安装有控制螺栓冲动作位置的位控机械臂,所述螺栓冲包括动力部以及冲栓末端,所述动力部表面安装有用于抓取以及存储螺母的第一存储装置,所述第一存储装置包括存储末端以及控制存储末端偏转的动力转轴,所述动力转轴与存储末端之间通过连接平台连接,所述存储末端靠近连接平台一侧开有第一通过窗口,动力转轴远离连接平台一侧开有第二通过窗口,所述第一通过窗口与冲栓末端位置相匹配;所述第一通过窗口和第二通过窗口外侧均安装有用于控制螺母移动的抓取装置,与第一通过窗口相对的抓取装置将冲栓末端内的螺母抓取至存储末端内,与第二通过窗口相对的抓取装置将存储末端内的螺母推出集中存储。
4、通过第一存储装置能够对冲栓末端内拆卸完毕的螺母进行稳定的抓取以及存储,能够代替人工手动摘取螺母的动作,实现了拆螺栓、取螺母的全自动化操作,极大地提高了拆螺栓工作的效率,保证了工作人员的安全性。
5、优选地,所述行走主体表面还安装有第二存储装置,所述第二存储装置内径尺寸以及位置与第二通过窗口相匹配,与第二通过窗口相对的抓取装置将冲栓末端内的螺母推出至第二存储装置内集中存储。
6、通过第二存储装置能够对螺母进行集中存储,能够降低第一存储装置内过量螺母产生的压力,保证第一存储装置正常快速偏转对螺母进行抓取;同时能够对螺母进行集中收集,便于后续螺母的安装。
7、优选地,所述第二存储装置内还设置有位控装置,通过所述位控装置驱动螺母在第二存储装置内定向移动。
8、通过设置位控装置能够进一步提高螺母在第二存储装置内移动的稳定性,保证螺母定向有序地进行移动,尤其适合对于大批量、大尺寸的螺母进行集中存储。
9、优选地,所述位控装置包括输送皮带,所述输送皮带安装于第二存储装置底部的位置,螺栓掉落至输送皮带表面,能够对螺栓进行承载并且定向输送。
10、优选地,所述位控装置包括电动转动的螺纹杆,所述第二存储装置内部设置有控制螺母定向移动的导向结构,所述螺纹杆外径与螺母内径相适配。
11、优选地,所述存储末端底部安装有顶升装置,通过所述顶升装置控制螺母在第一通过窗口、第二通过窗口之间线性移动。
12、优选地,所述抓取装置包括抓取主体、连接杆以及抓取凸轮,所述抓取凸轮固定于连接杆的第一端,通过所述抓取主体控制连接杆沿着轴线方向移动并且围绕轴线偏转,所述抓取装置相对于冲栓末端偏心安装。
13、抓取凸轮凸起的部分能够与螺母内壁相抵,在重力的作用下,螺母内壁能够与抓取凸轮上端紧密贴合,在抓取凸轮移动的过程中,能够带动螺母同步移动,实现螺母的上下料控制。
14、优选地,所述抓取凸轮凸起部分开设有螺纹槽,所述螺纹槽与螺母内壁相适配;二者之间能够处于咬合的状态,在抓取凸轮线性移动的过程中能够进一步保证螺母结构的稳定性。
15、本发明的有益效果为:
16、与现有技术相比较,通过第一存储装置能够对冲栓末端内拆卸完毕的螺母进行稳定的抓取以及存储,能够代替人工手动摘取螺母的动作,实现了拆螺栓、取螺母的全自动化操作,极大地提高了拆螺栓工作的效率,保证了工作人员的安全性。
技术特征:
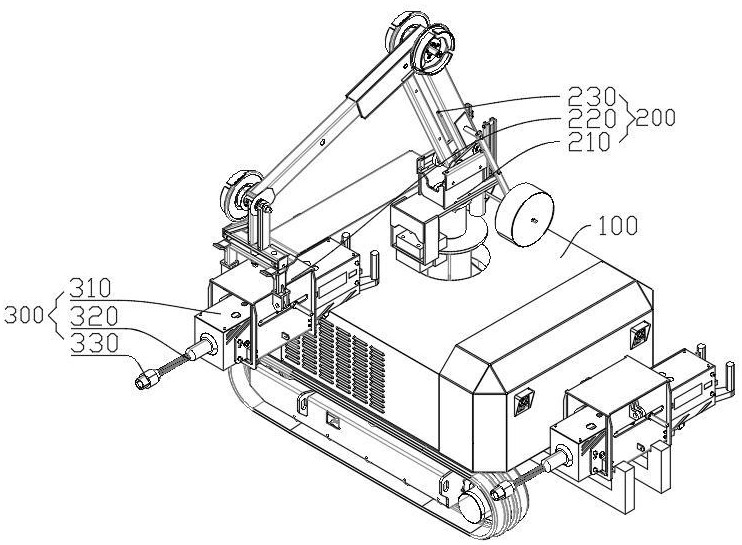
1.一种自动拆螺栓机器人,包括行走主体(100)以及螺栓冲(300),行走主体(100)上端安装有控制螺栓冲(300)动作位置的位控机械臂(200),其特征在于:
2.根据权利要求1所述的一种自动拆螺栓机器人,其特征在于,所述行走主体(100)表面还安装有第二存储装置(700),所述第二存储装置(700)内径尺寸以及位置与第二通过窗口(432)相匹配,与第二通过窗口(432)相对的抓取装置(500)将冲栓末端(330)内的螺母(800)推出至第二存储装置(700)内集中存储。
3.根据权利要求2所述的一种自动拆螺栓机器人,其特征在于,所述第二存储装置(700)内还设置有位控装置,通过所述位控装置驱动螺母(800)在第二存储装置(700)内定向移动。
4.根据权利要求3所述的一种自动拆螺栓机器人,其特征在于,所述位控装置包括输送皮带,所述输送皮带安装于第二存储装置(700)底部的位置,螺栓掉落至输送皮带表面,能够对螺栓进行承载并且定向输送。
5.根据权利要求3所述的一种自动拆螺栓机器人,其特征在于,所述位控装置包括电动转动的螺纹杆,所述第二存储装置(700)内部设置有控制螺母(800)定向移动的导向结构,所述螺纹杆外径与螺母(800)内径相适配。
6.根据权利要求3所述的一种自动拆螺栓机器人,其特征在于,所述存储末端(430)底部安装有顶升装置(600),通过所述顶升装置(600)控制螺母(800)在第一通过窗口(431)、第二通过窗口(432)之间线性移动。
7.根据权利要求1所述的一种自动拆螺栓机器人,其特征在于,所述抓取装置(500)包括抓取主体(510)、连接杆(520)以及抓取凸轮(530),所述抓取凸轮(530)固定于连接杆(520)的第一端,通过所述抓取主体(510)控制连接杆(520)沿着轴线方向移动并且围绕轴线偏转,所述抓取装置(500)相对于冲栓末端(330)偏心安装。
8.根据权利要求1所述的一种自动拆螺栓机器人,其特征在于,所述抓取凸轮(530)凸起部分开设有螺纹槽(531),所述螺纹槽(531)与螺母(800)内壁相适配。
技术总结
本发明提供一种自动拆螺栓机器人,本发明涉及拆螺栓技术领域,包括行走主体以及螺栓冲,行走主体上端安装有控制螺栓冲动作位置的位控机械臂,所述螺栓冲包括动力部以及冲栓末端,所示动力部表面安装有用于抓取以及存储螺母的第一存储装置,所述第一存储装置包括存储末端以及控制存储末端偏转的动力转轴,所述动力转轴与存储末端之间通过连接平台连接,所述存储末端靠近连接平台一侧开有第一通过窗口,动力转轴远离连接平台一侧开有第二通过窗口,所述第一通过窗口与冲栓末端位置相匹配。该发明实现了拆螺栓、取螺母的全自动化操作,极大地提高了拆螺栓工作的效率,保证了工作人员的安全性。
技术研发人员:陈志华,刘振辉,杜璟,周伟,刘文胜,付家坤,曾杰,洪兵,童岭,周健,朱雨健
受保护的技术使用者:铜陵有色金属集团股份有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:陈志华,刘振辉,杜璟,周伟,刘文胜,付家坤,曾杰,洪兵,童岭,周健,朱雨健
技术所有人:铜陵有色金属集团股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除