一种基于多源扰动补偿的机电平台参数辨识方法及装置
本技术涉及系统参数辨识,尤其是涉及一种基于多源扰动补偿的机电平台参数辨识方法及装置。
背景技术:
1、传统的系统辨识方案只需确定采集的输入信号和输出信号在系统中的位置,进而根据辨识结果确定对应的系统模型参数,且是针对线性模型辨识方案,即必须满足假设:系统为线性时不变系统。而典型二阶非线性系统不满足上述假设,存在计算复杂度高、对数据采集的丰富程度与信号品质的要求更高的缺点,且容易出现过拟合问题。
2、特别地,大部分无人系统往往搭载低成本mems传感器,其采集的数据品质较低,因此当系统为非线性特性时不可忽略;此外,考虑实际的运行工况和低成本mems传感器的约束,在进行系统参数辨识实验时,所采集信号势必会受到采样率低、测量噪声大、存在内外扰动等不良复杂因素的影响,导致辨识精度降低,进而传统的系统辨识方案的适用性较差,无法直接使用。
3、针对上述中的相关技术,发明人发现现有的系统辨识方案存在有不适用于非线性系统的参数辨识,辨识精度降低的问题。
技术实现思路
1、为了提高非线性系统的参数辨识精度,本技术提供了一种基于多源扰动补偿的机电平台参数辨识方法及装置。
2、第一方面,本技术提供一种基于多源扰动补偿的机电平台参数辨识方法。
3、本技术是通过以下技术方案得以实现的:
4、一种基于多源扰动补偿的机电平台参数辨识方法,包括以下步骤,
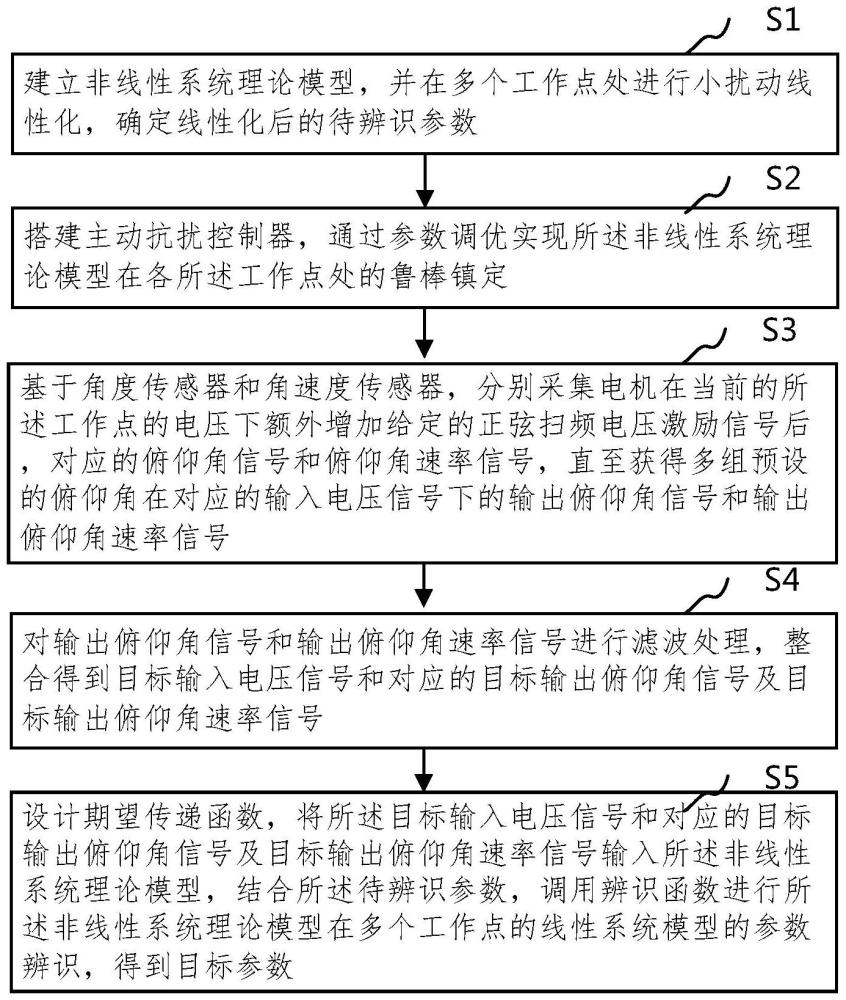
5、建立非线性系统理论模型,并在多个工作点处进行小扰动线性化,确定线性化后的待辨识参数;
6、搭建主动抗扰控制器,通过参数调优实现所述非线性系统理论模型在各所述工作点处的鲁棒镇定;
7、基于角度传感器和角速度传感器,分别采集电机在当前的所述工作点的电压下额外增加给定的正弦扫频电压激励信号后,对应的俯仰角信号和俯仰角速率信号,直至获得多组预设的俯仰角在对应的输入电压信号下的输出俯仰角信号和输出俯仰角速率信号;
8、对所述输出俯仰角信号和所述输出俯仰角速率信号进行滤波处理,整合得到目标输入电压信号和对应的目标输出俯仰角信号及目标输出俯仰角速率信号;
9、设计期望传递函数,将所述目标输入电压信号和对应的目标输出俯仰角信号及目标输出俯仰角速率信号输入所述非线性系统理论模型,结合所述待辨识参数,调用辨识函数进行所述非线性系统理论模型在多个工作点的线性系统模型的参数辨识,得到目标参数,所述目标参数用于机电转台系统模型。
10、本技术在一较佳示例中可以进一步配置为:所述搭建主动抗扰控制器的步骤包括,
11、设计包含标称控制器和干扰观测器的二自由度的主动抗扰控制器;
12、其中,所述标称控制器用于实现闭环控制系统的初步跟踪性能需求,所述干扰观测器用于对所述非线性系统理论模型内部参数的不确定性以及外界未知有界扰动进行在线估计,并在所述主动抗扰控制器的总输出中进行补偿。
13、本技术在一较佳示例中可以进一步配置为:所述主动抗扰控制器u的表达式包括,
14、
15、式中,t为时间;x为机电平台角度;为机电平台角速度;xd为输入期望角度;为输入期望角速度;为输入期望角加速度;u0(t)为标称控制器输出;为干扰观测器输出;为所述非线性系统理论模型的初始猜测参数;jp为所述非线性系统理论模型的已知转动惯量参数;kp、kd和t为待调优的参数。
16、本技术在一较佳示例中可以进一步配置为:所述对所述输出俯仰角信号和所述输出俯仰角速率信号进行滤波处理的步骤包括,
17、对于多组输出俯仰角信号,采用savitzky-golay平滑数字滤波器进行上采样处理;
18、对于多组输出俯仰角速率信号,采用低通滤波和线性函数拟合去趋势组合进行处理。
19、本技术在一较佳示例中可以进一步配置为:所述期望传递函数包括给定电压信号-俯仰角信号的待辨识俯仰通道动力学模型的传递函数和给定电压信号-俯仰角速率信号的待辨识俯仰通道动力学模型的传递函数;
20、给定电压信号-俯仰角信号的待辨识俯仰通道动力学模型的传递函数的表达式包括,
21、
22、给定电压信号-俯仰角速率信号的待辨识俯仰通道动力学模型的传递函数的表达式包括,
23、
24、式中,s为传递函数的微分算子,jp为所述非线性系统理论模型的已知转动惯量参数,dp,ksp分别为所述非线性系统理论模型的初始猜测参数的准确估计值,k3为增益项。
25、本技术在一较佳示例中可以进一步配置为:所述辨识函数采用matlab的tfest函数。
26、第二方面,本技术提供一种基于多源扰动补偿的机电平台参数辨识装置。
27、本技术是通过以下技术方案得以实现的:
28、一种基于多源扰动补偿的机电平台参数辨识装置,包括,
29、非线性模型模块,用于建立非线性系统理论模型,并在多个工作点处进行小扰动线性化,确定线性化后的待辨识参数;
30、鲁棒模块,用于搭建主动抗扰控制器,通过参数调优实现所述非线性系统理论模型在各所述工作点处的鲁棒镇定;
31、采集模块,用于基于角度传感器和角速度传感器,分别采集电机在当前的所述工作点的电压下额外增加给定的正弦扫频电压激励信号后,对应的俯仰角信号和俯仰角速率信号,直至获得多组预设的俯仰角在对应的输入电压信号下的输出俯仰角信号和输出俯仰角速率信号;
32、滤波模块,用于对所述输出俯仰角信号和所述输出俯仰角速率信号进行滤波处理,整合得到目标输入电压信号和对应的目标输出俯仰角信号及目标输出俯仰角速率信号;
33、辨识模块,用于设计期望传递函数,将所述目标输入电压信号和对应的目标输出俯仰角信号及目标输出俯仰角速率信号输入所述非线性系统理论模型,结合所述待辨识参数,调用辨识函数进行所述非线性系统理论模型在多个工作点的线性系统模型的参数辨识,得到目标参数,所述目标参数用于机电转台系统模型。
34、第三方面,本技术提供一种计算机设备。
35、本技术是通过以下技术方案得以实现的:
36、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一种基于多源扰动补偿的机电平台参数辨识方法的步骤。
37、第四方面,本技术提供一种计算机可读存储介质。
38、本技术是通过以下技术方案得以实现的:
39、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一种基于多源扰动补偿的机电平台参数辨识方法的步骤。
40、第五方面,本技术提供一种计算机程序产品。
41、本技术是通过以下技术方案得以实现的:
42、一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现上述任意一种基于多源扰动补偿的机电平台参数辨识方法的步骤。
43、综上所述,与现有技术相比,本技术提供的技术方案带来的有益效果至少包括:
44、建立非线性系统理论模型,并在多个工作点处进行小扰动线性化,以得到单个非线性系统模型在不同工作点处的线性化模型,确定线性化后的待辨识参数;搭建主动抗扰控制器,主动引入闭环控制器,通过参数调优实现所述非线性系统理论模型在各所述工作点处的鲁棒镇定,有利于在模型初始参数不准确的条件下,在指定的工作点处实现鲁棒镇定;基于角度传感器和角速度传感器,分别采集电机在当前的所述工作点的电压下额外增加给定的正弦扫频电压激励信号后,对应的俯仰角信号和俯仰角速率信号,直至获得多组预设的俯仰角在对应的输入电压信号下的输出俯仰角信号和输出俯仰角速率信号,正弦扫频电压激励信号的频域信息更充分,针对不同测量传感器的特性,俯仰角和俯仰角速率是系统的零阶和一阶状态量,能够全面充分地表征系统的当前运动模态,从而为辨识提供充足有效的模型响应信息,有利于提高后续的辨识精度;对所述输出俯仰角信号和所述输出俯仰角速率信号进行滤波处理,以减少采集信号受噪声大、存在内外扰动等不良复杂因素的影响,有利于提高后续的辨识精度;设计期望传递函数,将所述目标输入电压信号和对应的目标输出俯仰角信号及目标输出俯仰角速率信号输入所述非线性系统理论模型,结合所述待辨识参数,调用辨识函数进行所述非线性系统理论模型在多个工作点的线性系统模型的参数辨识,得到目标参数,目标参数用于机电转台系统模型,可以保证将该非线性系统鲁棒、精准地镇定于对应的工作点处;进而提高了非线性系统的参数辨识精度,增强了系统参数辨识方案在非线性方面的适用性,实现对一种广泛存在的受扰非线性二阶机电平台进行高精度参数辨识的目的;本方案的非线性系统辨识方案的辨识结果即为模型的真实物理参数,可解释性强,能够直接辅助科研人员建立精准的系统模型,同时考虑了工程应用背景下的辨识需求,无需大量且高品质的输入-输出数据,有效处理了实际环境中存在的多源扰动因素,工程落地性强。
技术研发人员:朱波,易鹏,杨梓霄,张雷,张清瑞
技术所有人:中山大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除