伺服电机控制方法、系统、电子装置和存储介质与流程
本申请涉及伺服电机控制领域,特别是涉及一种伺服电机控制方法、系统、电子装置和存储介质。
背景技术:
1、伺服系统主要由伺服驱动器和伺服电机构成,伺服电机(简称电机)在伺服驱动器(简称驱动器)的控制下转动,进而带动负载发生运动。在实际使用电机的过程中,需要给驱动器设置速度窗口(当前运行速度与目标速度之间的误差)以及窗口时间参数,以保证驱动器在合理的速度下置标志位。当某一个设备或者工况需要遍历各个不同级别的运动速度,且对于速度的精确性有要求时,一个速度窗口无法覆盖全部级别的运动速度。
2、例如,当目标速度为100m/s时,设置速度窗口为5,驱动器会在100m/s±5m/s区间内,并保持一定时间,设置相应的标志位,以代表目标速度达到信号,生成运动信号。
3、当目标速度为500m/s,如果使用之前的速度窗口,则驱动器需要在500m/s±5m/s区间内,并保持一定时间,才会设置相应的标志位。
4、其中,对于速度达到100m/s时刻,±5m/s的误差对于100m/s来讲,精度要求在5%以内。但是对于500m/s来讲,精度要求为1%以内。而当速度加速到1000m/s甚至2000m/s时,精度要求更为苛刻。固定的速度窗口参数可能导致在高速运转时系统响应较慢。如此,固定的窗口参数,会使得电机运行速度达到目标速度的真实要求会出现差异,影响速度稳定性的判断和系统响应时间。
5、针对相关技术中存在伺服电机控制方法不合理的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种伺服电机控制方法、系统、电子装置和存储介质,以解决相关技术中存在伺服电机控制方法不合理的问题。
2、第一个方面,在本实施例中提供了一种伺服电机控制方法,运行于伺服驱动器,所述伺服驱动器与伺服电机连接;所述方法包括:
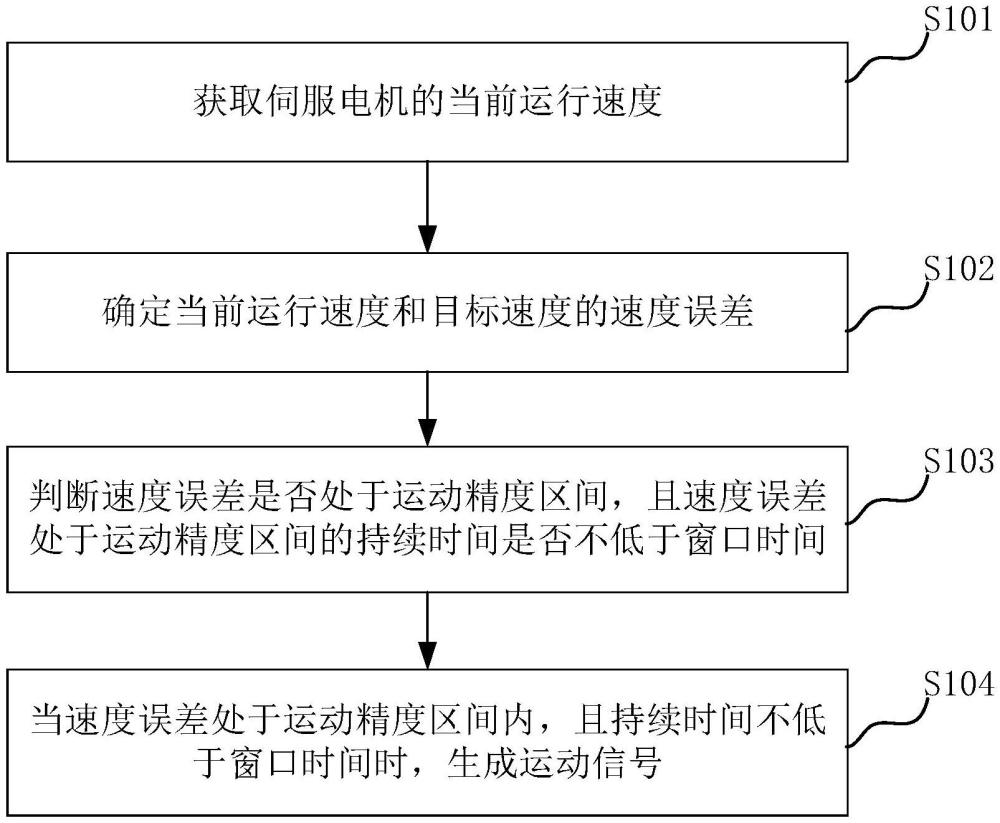
3、获取所述伺服电机的当前运行速度;
4、确定所述当前运行速度和目标速度的速度误差;
5、判断所述速度误差是否处于运动精度区间,且所述速度误差处于所述运动精度区间的持续时间是否不低于窗口时间;
6、当所述速度误差处于所述运动精度区间内,且所述持续时间不低于所述窗口时间时,生成运动信号。
7、在其中的一些实施例中,在获取伺服电机的当前运行速度之前,所述方法还包括:
8、在所述伺服驱动器中写入配置参数,其中,所述配置参数包括以下至少之一:所述目标速度、所述预设精度参数、所述窗口时间。
9、在其中的一些实施例中,在获取伺服电机的当前运行速度之前,所述方法还包括:
10、在所述伺服驱动器中写入速度窗口的值。
11、在其中的一些实施例中,在获取伺服电机的当前运行速度之后,所述方法还包括:
12、判断所述速度误差是否处于所述速度窗口,且所述速度误差处于所述速度窗口的持续时间是否不低于所述窗口时间;
13、在判断到所述速度误差处于所述速度窗口,且所述速度误差处于所述速度窗口的持续时间不低于所述窗口时间的情况下,生成所述运动信号。
14、在其中的一些实施例中,生成运动信号,包括:
15、对所述伺服驱动器中的预设标志位进行置位。
16、在其中的一些实施例中,在生成运动信号之后,所述方法还包括:
17、变更所述伺服电机的运行速度。
18、第二个方面,在本实施例中提供了一种伺服系统,包括:相互连接的伺服驱动器和伺服电机,所述伺服电机用于和负载连接;其中,所述伺服驱动器用于执行上述第一个方面所述的伺服电机控制方法,所述伺服电机用于在所述伺服驱动器的控制下转动,进而带动所述负载发生运动。
19、第三个方面,在本实施例中提供了一种医疗系统,包括:上述第二个方面所述的伺服系统和医疗负载设备,所述伺服系统与所述医疗负载设备连接,所述医疗负载设备在所述伺服系统的控制下发生运动。
20、第四个方面,在本实施例中提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述第一个方面所述的伺服电机控制方法。
21、第五个方面,在本实施例中提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一个方面所述的伺服电机控制方法的步骤。
22、上述伺服电机控制方法、系统、电子装置和存储介质,运动精度区间跟随目标速度的变化而变化,精度却保持不变,不会影响速度稳定性的判断和系统响应时间。而目标速度和预设精度参数可以在伺服电机运行之前写入伺服驱动器,无需在伺服电机运行阶段手动改写。相比于传统方案中依靠手动改写速度窗口,本申请可以简化参数设置,而少写参数可以降低通讯负载。同时也降低了出错的可能性,减少不必要的数据交互,并且也提高了对相应标志位进行置位的准确性。因此,解决了伺服电机控制方法不合理的问题。
23、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种伺服电机控制方法,其特征在于,运行于伺服驱动器,所述伺服驱动器与伺服电机连接;所述方法包括:
2.根据权利要求1所述的伺服电机控制方法,其特征在于,在获取伺服电机的当前运行速度之前,所述方法还包括:
3.根据权利要求2所述的伺服电机控制方法,其特征在于,在获取伺服电机的当前运行速度之前,所述方法还包括:
4.根据权利要求3所述的伺服电机控制方法,其特征在于,在获取伺服电机的当前运行速度之后,所述方法还包括:
5.根据权利要求1所述的伺服电机控制方法,其特征在于,生成运动信号,包括:
6.根据权利要求1所述的伺服电机控制方法,其特征在于,在生成运动信号之后,所述方法还包括:
7.一种伺服系统,其特征在于,包括:相互连接的伺服驱动器和伺服电机,所述伺服电机用于和负载连接;其中,所述伺服驱动器用于执行权利要求1至6中任一项所述的伺服电机控制方法,所述伺服电机用于在所述伺服驱动器的控制下转动,进而带动所述负载发生运动。
8.一种医疗系统,其特征在于,包括:权利要求7所述的伺服系统和医疗负载设备,所述伺服系统与所述医疗负载设备连接,所述医疗负载设备在所述伺服系统的控制下发生运动。
9.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至6中任一项所述的伺服电机控制方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的伺服电机控制方法的步骤。
技术总结
本申请涉及一种伺服电机控制方法、系统、电子装置和存储介质,通过获取伺服电机的当前运行速度;确定当前运行速度和目标速度的速度误差;判断速度误差是否处于运动精度区间,且速度误差处于运动精度区间的持续时间是否不低于窗口时间;当速度误差处于运动精度区间内,且持续时间不低于窗口时间时,生成运动信号;解决了相关技术中存在伺服电机控制方法不合理的问题。
技术研发人员:郭方安
受保护的技术使用者:上海联影医疗科技股份有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:郭方安
技术所有人:上海联影医疗科技股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除