一种适用于狭小空间装配的技能操作方法及装置
本技术涉及机器人装配操作领域。
背景技术:
1、机器人装配场景中,在装配空间足够时,大多数机器人装配技能操作,会先通过目标位姿检测装置,如视觉、触觉等传感器,对装配目标的位姿进行精确测量,以辅助机器人装配技能操作。
2、然而机器人狭小空间装配场景是无法避免的。在狭小空间下进行机器人装配技能操作,存在视野受限、目标不可见、无法精确调整装配、装置与目标易发生碰撞干涉等问题。而进行目标位姿检测的传统视觉、触觉传感器装置由于体积问题,无法对狭小空间下的装配目标进行精确位姿检测。
3、例如,针对3c手机装配场景,由于零件分布精密、各零件装配时易相互干涉、装配空间受限,是一种典型的狭小空间装配场景。目前面对手机软排线装配,由于装配过程中视野受限、无法使用感知设备测量目标位姿,仍然采用人工装配的方式。
4、综上,现有机器人装配操作在狭小空间内进行时,存在多个技术问题。首先,狭小空间导致机器人装配操作的视野受限,传统视觉传感器难以有效获取装配目标的完整位姿信息。此外,在狭小空间内,装配目标可能处于不可见状态,传统的视觉和触觉传感器由于体积问题,无法对装配目标进行精确位姿检测。由于视野受限和目标不可见,机器人难以进行精确的装配调整,影响装配的精度和效率。此外,狭小空间内机器人装配装置与装配目标以及周围环境易发生碰撞干涉,导致装配失败或损坏。目前在手机软排线装配等典型狭小空间装配场景中,由于无法有效利用感知设备测量目标位姿,仍然依赖于人工装配,效率低下且易出错。
技术实现思路
1、本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本技术的第一个目的在于提出一种适用于狭小空间装配的技能操作方法,通过设计手机软排线智能装配末端,搭建高逼真度虚拟仿真平台,对装配场景进行虚拟重建,并在虚拟环境中通过对装配目标的多个视角检测测量,对真实世界的装配过程中视觉遮挡进行视角补全,从而感知装配目标的准确姿态,完成狭小空间装配的技能操作。
3、本技术的第二个目的在于提出一种适用于狭小空间装配的技能操作装置。
4、本技术的第三个目的在于提出一种电子设备。
5、本技术的第四个目的在于提出一种计算机可读存储介质。
6、本技术的第五个目的在于提出一种计算机程序产品。
7、为达上述目的,本技术第一方面实施例提出了一种适用于狭小空间装配的技能操作方法,包括:
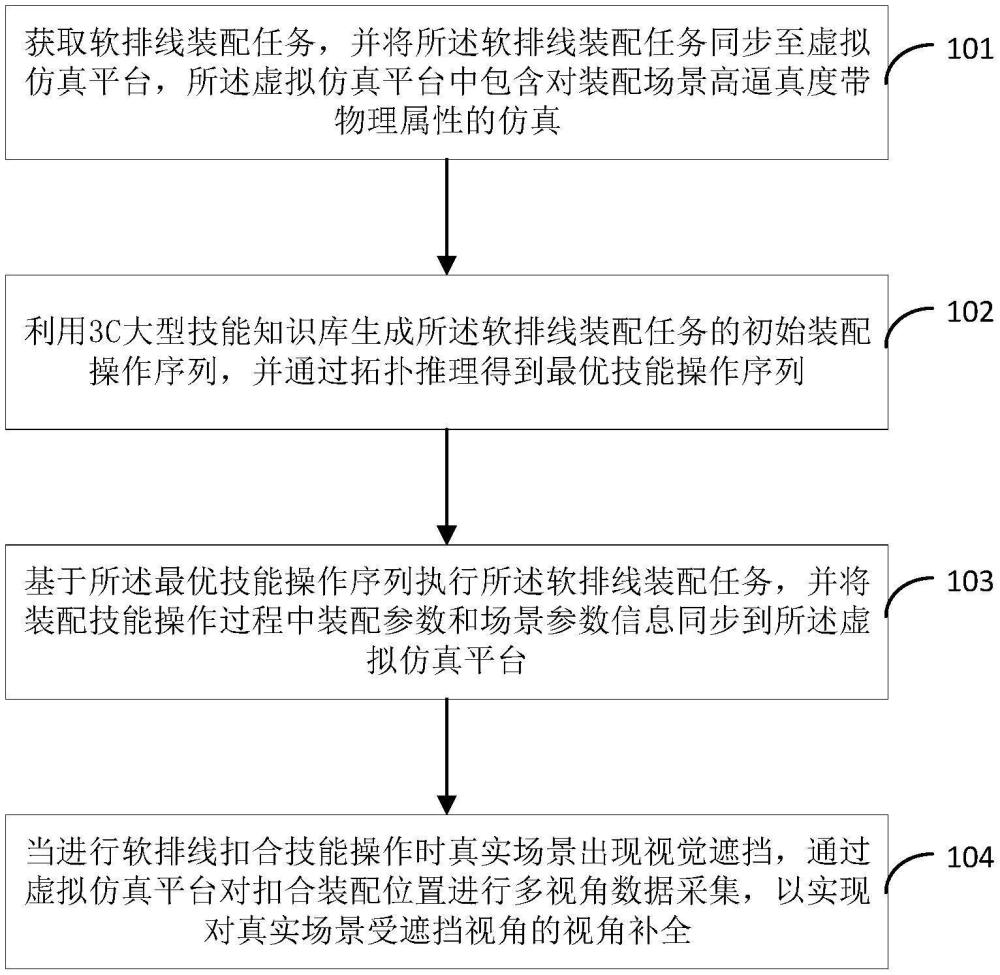
8、获取软排线装配任务,并将所述软排线装配任务同步至虚拟仿真平台,所述虚拟仿真平台中包含对装配场景的高逼真度带物理属性的仿真;
9、利用3c大型技能知识库生成所述软排线装配任务的初始装配操作序列,并通过拓扑推理得到最优技能操作序列;
10、基于所述最优技能操作序列执行所述软排线装配任务,并将装配技能操作过程中装配参数和场景参数信息同步到所述虚拟仿真平台;
11、当进行软排线扣合技能操作时真实场景出现视觉遮挡,通过虚拟仿真平台对扣合装配位置进行多视角数据采集,以实现对真实场景受遮挡视角的视角补全。
12、可选的,所述装配场景的仿真包括手机软排线装配平台虚拟仿真、六自由度机械臂虚拟仿真、手机软排线智能装配末端虚拟仿真、手机载具台虚拟仿真。
13、可选的,手机软排线智能装配末端内部集成有视觉检测相机、触觉传感器、滑台气缸和负压吸取装置。
14、可选的,所述利用3c大型技能知识库生成所述软排线装配任务的初始装配操作序列,并通过拓扑推理得到最优技能操作序列,包括:
15、基于所述软排线装配任务,从3c大型技能知识库中提取相关的装配技能和操作步骤;
16、根据提取的装配技能和操作步骤,生成所述软排线装配任务的初始装配操作序列;
17、运用拓扑推理算法,考虑各种约束条件对所述初始装配操作序列进行优化,得到最优技能操作序列。
18、可选的,所述基于所述最优技能操作序列执行所述软排线装配任务,并将装配技能操作过程中装配参数和场景参数信息同步到所述虚拟仿真平台,包括:
19、基于所述最优技能操作序列,结合通过视觉检测相机获取的rgbd图像和机械臂状态信息,实现软排线的装配技能操作,所述装配技能操作包括软排线的检测、吸取、精确定位;
20、将装配技能操作过程中装配场景内各部分以及软排线的姿态和位置,同步到所述虚拟仿真平台。
21、可选的,所述当进行软排线扣合技能操作时真实场景出现视觉遮挡,通过虚拟仿真平台对扣合装配位置进行多视角数据采集,以实现对真实场景受遮挡视角的视角补全,包括:
22、当进行软排线扣合技能操作时真实场景出现视觉遮挡,通过虚拟仿真平台对扣合装配位置进行多视角数据采集,通过基于带物理属性的高逼真度虚拟仿真和3维重构,实现虚拟场景下的受遮挡视角补全;
23、将视角补全后的虚拟感知信息传递到真实场景的装配技能操作过程,以实现对真实场景受遮挡视角的视角补全。
24、可选的,还包括:
25、在装配技能操作过程中,通过虚拟仿真平台对软排线扣合位置进行测量,以及通过触觉传感器实时监测接触力,实现装配场景内各部分的动态调整。
26、为达上述目的,本技术第二方面实施例提出了一种适用于狭小空间装配的技能操作装置,包括:
27、仿真模块,用于获取软排线装配任务,并将所述软排线装配任务同步至虚拟仿真平台,所述虚拟仿真平台中包含装配场景的仿真;
28、装配操作序列生成模块,用于利用3c大型技能知识库生成所述软排线装配任务的初始装配操作序列,并通过拓扑推理得到最优技能操作序列;
29、装配技能操作模块,用于基于所述最优技能操作序列执行所述软排线装配任务,并将装配技能操作过程中装配场景与软排线的信息同步到所述虚拟仿真平台;
30、视角补全模块,当进行软排线扣合技能操作时真实场景出现视觉遮挡,用于通过虚拟仿真平台对扣合装配位置进行多视角数据采集,以实现对真实场景受遮挡视角的视角补全。
31、为达上述目的,本技术第三方面实施例提出了一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
32、所述存储器存储计算机执行指令;
33、所述处理器执行所述存储器存储的计算机执行指令,以实现如上述第一方面中任一项所述的方法。
34、为达上述目的,本技术第四方面实施例提出了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如上述第一方面中任一项所述的方法。
35、为达上述目的,本技术第五方面实施例提出了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上述第一方面中任一项所述的方法。
36、本技术的实施例提供的技术方案至少带来以下有益效果:
37、采用虚拟重建技术,通过在虚拟环境中对装配目标的多个视角进行检测和测量,实现对真实世界装配过程中视觉遮挡的视角补全,有效避免了由于视野受限和目标不可见而导致的操作失误和装配失败,有效克服传统传感器在狭小空间中的测量盲区问题,增强了装配技能操作的可靠性与精准度,减少了对人工装配的依赖,不仅提高了装配速度和一致性,还降低了人工操作的误差和疲劳。
38、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
技术研发人员:孙富春,周怀东
技术所有人:清华大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除