基于边缘端的可见光图像中的绝缘子检测方法
本发明属于数字图像处理领域,涉及可见光图像中的目标确认方法,具体是一种基于边缘端的可见光图像中的绝缘子检测方法。
背景技术:
1、随着我国电网规模的爆发式增长,电网分布范围广、传输距离长与现阶段巡检效率低、劳动高强度大之间的矛盾日益凸显,因此,亟需探索一种新的巡检模式,以适应电网快速发展的需求。
2、无人机智能巡检应运而生,利用高效智能的无人机巡航模式,可以降低线路的运维压力,提高电力主网的安全性,增强设备运行状态的管控水平,并弥补了传统人工巡检的不足。然而,目前多旋翼无人机巡检仍然存在一些问题:如续航时间短、受图传信号传输距离限制以及无法实时进行数据分析等。
3、另一方面,机载ai边缘图像快速准确的识别技术,可将计算和识别过程转移到设备边缘实现实时处理。但在高速巡航条件下,图像识别算法的快速响应和准确性成为关键挑战,需要针对快速移动和不稳定拍摄条件进行优化。
4、为了解决上述问题,亟需开发一种适用于边缘端可见光图像的高效绝缘子目标识别方法,能够在复杂环境下快速、准确地对绝缘子目标进行检测与识别,满足电网巡检的实时性和可靠性要求,同时降低数据传输负荷,提高系统整体性能。
技术实现思路
1、本发明提出了一种基于边缘端的可见光图像中的绝缘子检测方法,根据绝缘子目标在可见光图像上的成像特征信息,将绝缘子的灰度与纹理特征描述、形状特征与适应不同背景的绝缘子平面特征的绝缘子确认等多种技术相结合,有效提高了可见光图像中绝缘子检测的准确率,并降低了运算复杂度和对存储的要求。
2、具体步骤如下:
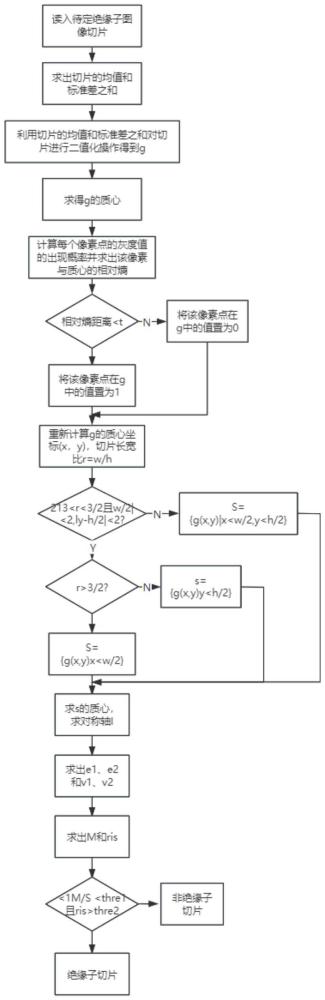
3、步骤一、输入一个可见光图像,并从中提取出n个待检测绝缘子图像切片;
4、其中,每个图像切片仅包含一个潜在绝缘子目标;切片s的潜在绝缘子目标为t';
5、步骤二、针对当前切片s遍历所有像素,求出像素灰度值的均值和标准差;
6、其像素均值μ和方差σ的计算公式如下:
7、
8、其中f(x,y)是切片s上像素坐标为(x,y)的灰度值,w和h分别代表切片s的宽和高;
9、步骤三、利用均值和方差对图像切片s进行二值化操作以获得二值图g',进一步求得二值图g'中潜在绝缘子目标t'的质心m0'的位置;
10、二值图计算公式如下:
11、g'(x,y)=l{f(x,y)>μ+σ} (3)
12、其中g'(x,y)为切片s上坐标(x,y)的像素二值化后对应的值,l{·}为二值化指示函数;
13、潜在绝缘子目标t'的质心m0'位置(x0',y0'),计算公式为:
14、
15、步骤四、遍历切片s,计算每个像素点的灰度值在整个切片中的出现概率pi:
16、
17、其中h(i)x,y代表所述切片s上灰度值为i的各像素点的指示值;
18、h(i)x,y=l{f(x,y)=i} (6)
19、其中f(x,y)=i代表所述切片中坐标(x,y)的像素点对应的灰度值为i;
20、步骤五、利用概率,计算切片s随机像素点q与质心点m0'的相对熵,将该切片分为潜在目标区域和背景区域两类:
21、针对随机像素点q,与质心点m0'的相对熵计算如下:
22、
23、为质心点m0'的灰度值的出现概率,pq为像素点q的灰度值的出现概率;
24、步骤六、将该切片中每个像素点分别与质心点m0'的相对熵,利用k-means将两类区域的相对熵进行聚类,把中心值小的聚类簇在二值图中置为1,并获得更新的二值图g,进一步求得潜在绝缘子目标t的质心m0的位置(x0,y0);
25、该二值图中的潜在绝缘子目标t的坐标t(x,y)与质心m0满足8邻域连通;
26、8邻域连通是指:在二值化图像中,将每个像素点视为一个节点,如果两个像素点在水平、垂直或对角线方向上相邻,则认为它们是8邻域连通的。
27、步骤七、利用二值图g中潜在绝缘子目标t的面积st,以及质心m0'的位置,对质心m0的位置(x0,y0)进行更新。
28、步骤八、分别计算切片s的长宽比r,以及质心m0到切片中心点的距离,依据绝缘子形状特性从切片s中获取具有对称关系的子块s,并计算所述子块s的质心m1的位置;
29、长宽比r和质心m0到切片中心点的距离,计算公式如下:
30、r=w/h (8)
31、dx=|x0-w/2| (9)
32、dy=|y0-h/2| (10)
33、其中dx为质心m0与切片中心点在x轴方向上的距离,dy为质心m0与切片中心点在y轴方向上的距离。
34、分成以下三种情况求出质心m1位置:
35、(i)若2/3<r<3/2且dx<2,dy<2,则从切片s的二值图g中取子块s,该子块s满足s{(x,y)|x<w/2,y<h/2},使用如下公式求出其质心m1的位置(x1,y1):
36、
37、质心m1的位置(x1,y1)到子块s中心点的距离:
38、sdx=|x1-w/4|
39、sdy=|y1-h/4| (12)
40、其中sdx为质心m1与子块s中心点在x轴方向上的距离,sdy为质心m1与子块s中心点在y轴方向上的距离;
41、若sdx≥2或sdy≥2,则重新从二值图g中取子块s{(x,y)|x<w/2,h/2≤y≤h}并用公式(11)求其质心m1。
42、(ii)若r>3/2,则从二值图g中取s{(x,y)|x<w/2}为子块并用公式(11)求其质心m1。
43、(iii)若r<2/3,则从二值图g中取s{(x,y)|y<h/2}为子块并用公式(11)求其质心m1。
44、步骤九、根据上述两个质心m0和m1的位置,计算出潜在绝缘子目标t的对称轴直线,并得到潜在绝缘子目标t在切片s中的位置方向;
45、对称轴直线的斜率k,计算公式如下:
46、k=(y1-y0)/(x1-x0) (13)
47、潜在绝缘子目标t在切片s中的位置方向,计算公式如下:
48、y-y0=k(x-x0) (14)
49、其中:质心m0的坐标为(x0,y0),质心m1的坐标为(x1,y1);
50、步骤十、以质心m0为起始点,分别在对称轴直线两侧找到属于潜在绝缘子目标t,且距离对称轴垂直距离最远的点e1和e2,并找到所述对称轴与潜在绝缘子目标t外边缘轮廓相交的点v1和v2;
51、步骤十一、计算潜在绝缘子目标t最小外接矩形的面积m,并根据的点e1,e2,v1和v2分别计算各个点到质心m0的距离ed1,ed2,vd1和vd2,依据所述距离计算比值若所述面积m和比值rls均符合预设判断条件,则判定潜在绝缘子目标t为绝缘子,否则判定潜在绝缘子目标t不是绝缘子。
52、判断条件为:
53、(i)若得到1<m/st<thre1且rls>thre2,则判定潜在绝缘子目标t为绝缘子;
54、(ii)若不符合(i)则判定潜在绝缘子目标t不是绝缘子。
55、其中,thre1和thre2为根据真实绝缘子跟分辨率的关系设定的阈值。
56、本发明的优点在于:
57、1.本发明一种基于边缘端的可见光图像中的绝缘子检测方法,计算绝缘子平面几何特征时所用到的计算复杂度低、计算量小,所需要保存的数据少,适用于绝缘子确认。
58、2.本发明一种基于边缘端的可见光图像中的绝缘子检测方法,利用相对熵来衡量当前像素点与聚类中心的距离,在精确逼近边界处时有较好的分割效果,能更准确地区分开切片中的潜在目标与背景。
59、3.本发明一种基于边缘端的可见光图像中的绝缘子检测方法,绝缘子的平面几何特征具有普适性,在各种光照背景下的变化较小,能适用于复杂多变的环境和不同分辨率下的图像中正确地分辨绝缘子目标和非绝缘子目标。
技术研发人员:刘宇晨,谢笑阳,梁堉
技术所有人:北京工业大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除