用于自动放射疗法治疗计划的系统和方法与流程
本发明涉及一种用于放射疗法治疗计划的系统和方法,具体地,本发明涉及一种用于针对多个转移(metastases,mets)的自动立体定向放射外科计划的系统和方法以及其治疗方法。
背景技术:
1、在放射疗法治疗中已知使用光子、电子或质子或其他离子的射束并将它们导向患者的治疗区域以治疗该区域或体积。射束的形状被通常选择以使得要治疗的区域接收期望的剂量,同时限制对周围组织的剂量。特别地,应尽可能地保护被称为风险器官的敏感器官。为了实现这一点,可以围绕患者旋转的机架通常用于提供在不同角度的射束中的放射,使得所有射束将到达靶,而周围组织的每个部分将仅从一个或几个射束接收剂量,或者在弧射束的情况下,接收小于靶的程度。机架能够完全围绕患者旋转,或者部分地沿着圆周的分部旋转。当机架围绕患者移动时,机架可以以连续弧提供放射,或者停止以某些角度递送静态射束。治疗分部可以由多个弧或静态射束或其组合构成。患者被布置和固定在其上的患者卧榻还可以在放射递送期间或在静态射束或弧射束的递送之间旋转,以便修改相对于患者的放射方向。存在用于变化射束方向的其他装置,例如,放射源可以被安装在可移动机器人臂上,但是出于本讨论的目的,机架用作说明性示例。通常,在诸如光子疗法的放射疗法中,放置在射束平面(即,垂直于射束中心轴)中的准直器用于使射束成形,以便沉积剂量尽可能精确地匹配规定剂量。通常,准直器是多叶片准直器(mlc),如本文稍后所解释的。
2、如果存在多个转移(多转移(multimets))并且当旨在在一个治疗或治疗阶段中使用有限数量的射束同时治疗这样的多个转移以便节省治疗时间时,则放射外科的计划以指数方式变得更加困难。通常,在放射治疗中节省治疗时间具有若干优点,诸如节省时间和其成本、减少患者的不适以及减少患者可能潜在地将作为肿瘤的靶区域移出和移位靶向体积期间的时间。
3、在多转移放射外科的常规计划中,治疗计划器通常考虑一些参数来手动计划并且还将多个靶(转移)分组。这花费时间并且由于随着转移数量的增加而指数地增加潜在靶组而相当困难。如果实现最优分组,也留下不确定性,因为由于许多未知和可变的参数——诸如准直器角度、卧榻角度和机架角度,靶的手动分组是具有挑战性的。除了这些参数之外,在计划期间需要考虑暴露的非靶区域(enta)的减少和避免。各种转移形状或转移组可能导致enta问题,如本文参考附图所解释的。因此,治疗计划器的优化计划的负担很高。鉴于这些挑战,已经做出了努力来自动化对多转移案例的计划。
4、一些自动化工具和解决方案确实存在,但是它们仅解决有限数量的参数,例如仅某些mlc角度和/或机架角度,并且它们还检查完整靶集中的有限数量的靶组,并且不考虑给定数量的所有可能的组或靶中的所有可能的组。
5、另外,已知的工具和解决方案中的一些由于锯齿状mlc窗口或非曝光以及其非保形剂量递送的风险而努力在靶集的每个靶上递送相等的剂量或剂量目标。此外,当通过射束同时治疗不同深度处的多个转移时,由于光子射束的深剂量曲线,它们可能接收不同剂量。在放射疗法中,每个靶、转移或肿瘤应在可能的情况下在靶中接收可计划的放射剂量,在一些情况下这意味着均匀的剂量,并且在一些情况下意味着在靶上没有均匀分布的剂量,例如在靶中心的较高剂量,由此递送的剂量应尽可能接近剂量目标。这对于现有技术的方法和解决方案并不总是可能的。
6、现有技术解决方案(诸如例如体积调制弧疗法(vmat))的另一个问题是它们允许多叶片准直器的锯齿状开口。当需要控制和均匀分布靶体积中的剂量水平时,这种不符合的开口(参考图7a和7b)可能导致问题。通常,应当避免锯齿状mlc开口。锯齿状mlc开口是其中某些叶片比它们的相邻叶片延伸得更远的mlc开口。利用锯齿状的叶片开口和连续移动的机架,提供稳健的治疗是非常有挑战性的,并且提供质量保证是有问题的。通过使用保形系统和方法,特别是使用保形弧射束,可以利用本文提出的方法避免锯齿状mlc开口。然而,应当注意,锯齿状mlc开口在某些情况下可以是有利的,因为它们可以由于导致更多自由度的附加调制而促进在靶中达到剂量目标。
7、另外,如果目的是创建vmat计划,则通过从高质量保形弧计划起始优化,极大地简化了优化这种vmat计划的过程。从高质量保形弧计划起始通常导致最终弧计划具有比否则将获得的更高质量。因此,本发明还提供了在立体定向放射外科中改进vmat计划的方式。
技术实现思路
1、鉴于以上内容,本发明的目的是提供一种方法,该方法允许自动进行多转移病例的计划并且还改进使用立体定向放射外科(srs)的多转移治疗的效率。
2、另一目的是提供一种即使需要使用有限数量的射束在同一治疗或治疗阶段中治疗靶集合,也允许提供可以在整个靶上提供剂量目标的最优治疗的方法。
3、另一目的是提供一种允许节省时间和优化对多转移的放射治疗的方法。
4、在本发明的第一方面,本发明的发明人已经认识到,可以使用自动靶分组来改进用于多个转移的放射治疗的计划过程。因此,通过分析靶集合的一些或所有可能的靶划分并且因此还分析一些或所有可能的靶组组合,考虑到可能的机架角度和准直器角度对以及旨在避免桥间隙开口和/或避免暴露的非靶区域(enta)暴露于放射的常量,应当同时被治疗的靶集合被分割成若干靶组,该术语桥间隙开口在本文稍后参考图5a和5b解释。简而言之,桥间隙开口是当在不暴露靶之间的非靶组织或非靶区域的情况下叶片不能符合两个或更多个靶时的多叶片准直器(mlc)的配置。
5、在本发明的第二方面中,发明人已经认识到,如果靶集合超过靶的特定量n或者如果靶被定位得彼此相距太远,则可以执行聚类步骤以便将靶集合准备成最优自动分组。这样的聚类步骤可以包括以下步骤:基于靶的数量来选择聚类的最大数量m,将聚类中的靶的数量限制为小于或等于n,以及基于同一聚类的两个靶之间的最大允许距离来选择聚类中的靶。第二方面需要输入靶集合,包括它们的形状和相对于彼此的位置,并且然后考虑到所提及的参数(诸如可能的机架角度和准直器角度对)以及几何参数(诸如同一聚类的两个靶之间的最大允许距离)来递送最优聚类作为输出。
6、在第三方面,本发明涉及一种用于在输入具有针对每个靶的计算剂量和剂量水平目标的弧计划时的剂量控制阻挡的解决方案。一旦针对每个靶计算或确定了剂量水平目标,就经由mlc在弧路径或弧射束的一部分上或在一些控制点处阻挡具有过量剂量水平的靶。这意味着mlc的叶片在沿着候选弧路径的至少一些弧射束处的具有超过剂量水平的靶上方被完全关闭。可选地,更改射束的监视单元(mu)水平。遵循根据第三方面的方法,可以修改起始和停止机架角度以避免具有完全关闭的mlc的段或弧射束的存在。根据第三方面的方法的输出递送修改的优选保形弧计划——其改进了所有靶的剂量水平目标的实现,同时利用保形弧计划的有效且方便的mlc开口特性。
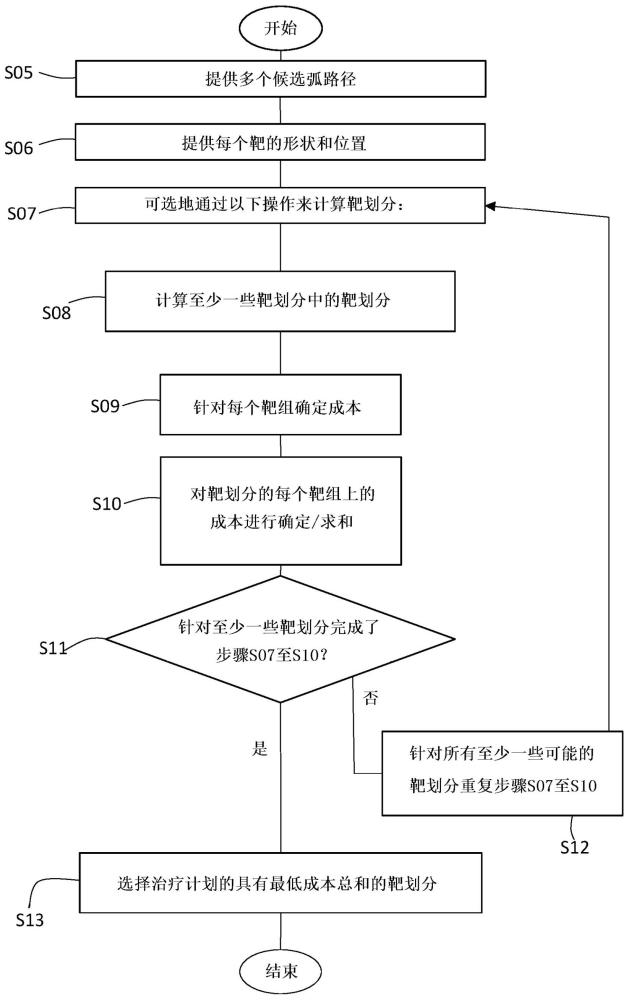
7、本文公开了一种用于生成放射疗法的治疗计划的治疗计划方法,其中要治疗靶集合。该方法使用用于成形弧射束的多叶片准直器(mlc)、包括mlc的机架、以及旨在定位患者的卧榻、椅子或其他结构,机架能够至少部分地围绕患者旋转。mlc可围绕射束轴旋转,从而限定准直器角度,机架可围绕机架轴旋转,从而限定机架角度,并且卧榻可围绕z轴旋转,从而限定卧榻角度。该方法包括以下步骤:
8、-提供用于治疗计划的具有等中心点和弧射束的最大数量的多个候选弧路径,并且取决于弧射束的最大数量,提供最大数量的靶组;
9、-提供该靶集合中的每个靶的三维形状和位置;
10、-基于当前候选弧路径来计算靶集合的至少一些可能的靶划分中的靶划分,至少一些可能的靶划分包括靶组的最大数量,至少一些可能的靶划分中的每个包括靶组,由此在一些情况下,每个靶是至少一个靶组的一部分;
11、-针对可能的靶划分的每个靶组,考虑当前候选弧路径、至少一个机架角度和至少一个mlc角度来确定成本;
12、-通过对可能的靶划分的每个靶组的成本求和来确定可能的靶划分和当前候选弧路径的成本;
13、-针对至少一些靶划分和候选弧路径中的每个重复计算、确定步骤,以及
14、-选择治疗计划的具有最低成本总和的最优靶划分和弧路径。
15、应注意,不必每个靶总是至少一个靶组或至少一个靶划分的一部分。然而,在一些情况下,满足该要求的靶划分可以如本文讨论的示例那样被使用和被配置用于治疗。
16、根据上述计算、确定和求和不需要对每个可能的靶划分执行,即使这可以被完成。为了节省诸如计算资源的资源,可以仅考虑相关的靶划分。靶划分的这种选择可以例如通过动态编程获得或以另一种方式提供,由此知道所使用的靶划分选择包括最优靶划分。例如,如果已知特定靶组导致高成本,则可以从要考虑的靶划分集合中移除包括该组的靶划分。
17、上述方法允许将靶集合馈送到诸如计算机或放射治疗计划系统的系统中,并且然后该方法自动计算至少一些可能的靶划分以用于评估并找到用于治疗的最优靶划分。因此,靶划分包括若干靶组,并且可以理解靶集合可以具有许多靶划分。靶划分和靶组可以具有以下条件:每个靶仅可以是一个组的一部分,或者对于每个候选弧路径每个靶仅可以是一个组的一部分,以避免一些靶被治疗得比其他靶更多,这将导致太高的放射剂量水平。自动靶划分及其靶分组使治疗计划器不负担非常复杂且耗时的计划。它还改进了治疗的结果,因为治疗方法考虑了所有可能的机架角度、mlc角度、成本和以及例如如下所述的enta成本总和或其他成本以及靶划分和靶组。可以将计算的某些限制馈送到系统中,限制诸如靶组中的靶的最大数量和靶划分中的靶组的最大数量以及可能还有几何考虑。几何考虑可以例如指定靶组的所有靶必须适合预定体积,使得它们在几何上彼此接近地布置,或者同一靶组中没有靶可以比预定距离更接近彼此。替代地,可以指定在垂直于靶组的所有靶的射束中心轴的平面上的投影必须适合预定区域。几何考虑或条件可以涉及最大和/或最小允许距离和/或体积。
18、可以考虑所有可能的靶划分用于计算步骤。替代地,可以仅考虑具有小于指定数量的靶组的靶划分用于计算步骤。替代地,具有已知导致差的解决方案的靶组的靶划分需要不被包括在计算步骤中考虑的靶划分中。替代地,可以考虑至多指定数量的靶划分。
19、所有提供的候选弧路径可以被用于优化。
20、替代地,对于候选弧路径,可以考虑静态场或静态射束。
21、在实施例中,已知的非最优靶划分,例如包括一个靶组中的所有靶或包括彼此远离或非常接近——诸如彼此距离超过5-6cm或诸如几mm(毫米)的非常接近——定位的至少两个靶的靶划分,可以直接从上述优化方法中排除。
22、在实施例中,计算步骤还可以考虑至少一个卧榻角度。
23、考虑至少一个卧榻角度可以还改进最优靶划分的结果,因为卧榻角度是可以被调整的附加参数。
24、在一个实施例中,靶组的最大数量由治疗计划器或从1至6的任何给定数量根据每个候选弧射束提供。
25、靶组的最大数量可以基于弧射束的允许的最大数量,或反之亦然。
26、在另一实施例中,计算步骤还可以包括将弧路径分割成以规则间隙间隔的控制点,每个间隙对应于机架角度段,其中,在每个控制点处计算最优mlc角度和/或最优卧榻角度。在该计算步骤期间可以考虑移动约束,诸如mlc的最大旋转速度或mlc的最大角度旋转。
27、通常沿着弧路径并且因此沿着机架路径以规则间隙间隔的预定控制点可以用于进一步优化靶划分并且选择最优靶组。另外,并且在每个控制点处,可以考虑若干mlc角度和卧榻角度。控制点可以例如沿着弧路径以1°、2°或4°机架角度间隙布置。可以基于目前的计算机的可用计算能力来选择控制点距离以及与其相距的规则间隙距离。
28、在另一实施例中,针对每个控制点计算最优mlc开口,由此基于最低成本和最优mlc角度相对于先前和后续控制点处的先前和后续mlc角度来选择最优mlc开度。
29、与上述一致,如果需要在控制点之间改变mlc角度,则增加附加成本。
30、在一些方法中,例如在点中,从一个控制点到下一个控制点的mlc角度的改变可能导致成本增加,因为在控制点之间调整mlc角度花费时间并且可能具有挑战性。然而,如果桥间隙打开或在当前控制点处的特定mlc开口中存在另一enta,则这种情况的成本可能更高,并且由此该方法可以选择旋转mlc并提供另一mlc角度,以便避免enta成本或另一增加的成本。
31、鉴于上述内容并且根据本文的实施例,计算步骤还可以包括将弧路径分割成以规则间隙间隔的控制点,每个间隙对应于机架角度段,其中,mlc角度针对沿着候选弧路径的每个控制点被保持在固定位置中,并且其中,针对每个控制点计算每个候选mlc角度的成本以针对每个候选弧路径找到最优固定mlc角度。
32、在另一实施例中,如果需要在相邻控制点之间改变卧榻角度,则可能增加成本。
33、改变卧榻角度可能导致延迟或不确定性,并且因此如果需要这种改变,则可能增加成本。
34、在另一实施例中,弧射束的最大数量对应于靶组的最大数量。
35、以上可以帮助实现每个靶和靶组的正确剂量水平目标。该状况可以还改进和减少患者的治疗时间。
36、在另一实施例中,弧射束可以是保形弧射束。
37、保形弧射束的使用提供了清晰且直接的剂量水平分布,因为每个靶接收使用保形弧计划的有效且有用的mlc开口特性的放射,或者当叶片完全在靶上方时根本不接收放射递送。保形mlc开口旨在在整个靶上完全打开或完全关闭,但是它们可能由于事故而打开,例如当它们需要在靶上移动以能够到达mlc在下一个控制点中的期望位置时。在这样的移动期间,可以考虑速度限制。可以避免一些叶片比它们的相邻叶片延伸得更远而进入开口的锯齿状叶片位置。然而,根据本公开的第三方面,可以允许完全剂量阻挡,因此在某些控制点中,可以调整mlc的一些叶片,使得一个或多个靶根本不接收放射,以便提供匹配或至少非常接近剂量水平目标的剂量水平。
38、在另一实施例中,该方法可以另外包括以下步骤:通常通过针对最优靶划分的每个靶组考虑最小机架角度间隙来检索具有最低成本mlc角度和机架角度对的最低成本弧射束,并且递送这些最低成本弧射束,由此每个弧射束与最优靶划分的一个靶组保形,使得每个靶组接收一个弧射束用于治疗。
39、可以提供最小机架角度间隙以便避免选择太小的机架间隙。
40、为最优靶划分的每个靶组提供具有最低成本mlc角度和机架角度对的最低成本弧射束或弧路径可能导致对目前的多转移病例的可能的治疗。这样的最低成本弧射束可以接近最初提供的候选弧路径,但是角度可以稍微变化。
41、所描述的方法和/或步骤可以用作vmat优化的起始点。因此,在目前治疗计划器具有若干转移和因此多转移的情况下,她/他可以使用本文所述的方法来优化其他治疗方法(诸如vmat)的起始点。
42、在另一实施例中,考虑对弧射束的最大数量的限制(例如,在弧射束的最大数量上总共的靶组的最大数量),考虑针对各种弧路径的至少一些可能的靶划分并且基于最优靶划分和最低成本弧射束来提供包括弧射束和弧路径的弧计划。
43、因此,该方法可以同时考虑至少一些可能的靶划分的若干弧路径以便找到最好治疗计划。
44、在另一实施例中,该方法可能还包括以下步骤:
45、-接收弧计划和最优靶划分中的每个靶的计算剂量,弧计划可以包括若干弧路径;
46、-为每个靶提供剂量水平目标并调整弧计划,使得每个靶至少获得剂量水平目标;
47、-替代地,为了实现或提供每个靶的正确剂量水平目标,可以使用靶的阻挡来实现靶之间的正确关系,并且然后在下一步骤中放大或优化控制点监测器单元mu;
48、-识别获得超过剂量水平目标的剂量水平的靶;以及
49、-计算所需的剂量控制块,其中mlc的叶片对于具有超过剂量水平目标的剂量水平的靶的一些弧射束的至少一部分完全关闭,以便优化剂量的递送,并且从而优化最优靶划分的所有靶的剂量水平目标。
50、前面段落中的上述方法可以独立于本文公开的任何其他方法使用。上述方法可以被称为剂量控制阻挡方法。该剂量控制阻挡方法如上所述是本文公开的本发明的第三方面,并且独立于本文公开的其他方法步骤。同时,剂量控制阻挡方法可以并且能够独立于其他特征和方法步骤与本文公开的任何方法步骤或特征一起使用和组合。
51、可以由放射治疗计划方法计算或提供的任何弧计划可以被用作如本文所公开的剂量控制阻挡方法的输入方法,以便在弧射束上的靶组中实现最优靶剂量水平。另外并且特别地,可以使用保形弧计划作为根据先前段落的剂量控制阻挡方法的输入。
52、剂量控制阻挡方法的输出可以是修改的保形弧计划,由此在一些位置或控制点中,一些靶被阻挡经由mlc的放射。通常,mlc将对每个控制点中的至少一个靶打开。在一些情况下,mlc可以在一些控制点中完全关闭。通过修改起始和停止机架角度以及潜在地修改mlc角度,可以避免具有完全关闭准直器的控制点或射束,因为这样的关闭段在治疗期间浪费时间。另一种选择是忽略完全阻挡的准直器或mlc段,并且在这些段上继续进行,而不在这些段中施加任何放射。
53、如所解释的,可以选择控制点和/或起始和停止机架角度,使得不存在所有靶都被阻挡的任何完全关闭的控制点或区段。
54、修正的起始和停止机架角度可以被适配和/或附加地包括由于这些区段中的完全关闭的mlc开口而被忽略的段。替代地,可以不修改起始和停止机架角度,而是忽略具有完全关闭的mlc配置或开口的段。
55、在根据本文的公开内容并且根据第二方面的另一实施例中,如果两个靶之间的距离超过某个阈值或者如果靶的数量超过n个靶,则在第一方面中公开的步骤之前执行聚类步骤。聚类步骤可以包括以下步骤:基于目前的靶的数量来选择聚类的最大数量m,将聚类中的靶的数量限制为小于或等于n,以及基于同一聚类的两个靶之间的最大允许距离或几何考虑或条件来选择聚类中的靶。
56、作为输入,可以提供靶的位置和三维形状。
57、在另一实施例中,如果当前靶划分中的靶组的总数量超过某个阈值,诸如15至20个靶组,则可能增加附加成本。
58、这可能导致改进的靶划分和优化的计划过程。
59、在另一实施例中,聚类步骤可以直接采取几何考虑作为初始条件。因此,如果检测到或确定两个靶彼此距离太远并且因此超过距离的阈值,由此阈值可以是6cm,则可以直接发起聚类步骤,而不限于目前的靶的数量n。可以使用靶的最大数量n和聚类的最大数量m以及几何考虑或几何条件的任何组合来发起聚类步骤。
60、如果存在多于三(3)个靶、多于四(4)个靶和/或多于五(5)个靶,优选多于十(10)至十五(15)个靶,则可以使用聚类步骤。聚类步骤减少了复杂性,因为用一个弧集合或方法治疗的靶的数量减少,并且因为它们在几何上彼此接近地布置。替代地,对于同一聚类的两个靶中的任一个之间的最大允许距离,如上所述,体积可以例如以cm3给出,在该体积中一个聚类的所有靶都需要拟合使得促进治疗和靶。这些几何条件(诸如最大体积或最大允许距离)被称为几何条件或几何考虑。
61、如上所述的聚类步骤是根据本文公开的第二方面,并且可以独立于本文公开的任何其他方法或特征来使用。聚类步骤或聚类方法不被连接到本文公开的本发明的第一方面或第三方面。聚类步骤或方法可以在诸如imrt或vmat的常规放射治疗之前使用,以准备并将要在一个且同一治疗中治疗的靶的数量减少到可管理的水平。
62、作为示例并且为了更好地图示聚类方法和步骤,提供了示例。患有脑癌的患者在其头部具有七(7)个转移,其中一些靠近右耳,而其他的靠近左眼。靶(转移)之间的最大允许距离为6cm。因此,要求聚类中的所有靶必须彼此间隔比6cm更近或等于6cm。一个聚类中的靶的最大数量被设置为四(4)个,其对应于n,并且由此靶的总数七(7)个超过一个聚类中允许的靶的数量四(4)个。在这种情况下,聚类的最大数量m为三(3)个。只要满足最大距离为6cm的标准,例如靠近右耳的第一聚类将包含4个靶,并且例如靠近左眼的第二聚类将包含剩余的3个靶。尽管理论上允许第三聚类,但是由于不超过每个聚类四个靶的最大数量n并且由于不违反6cm最大允许距离条件,因此不需要第三聚类。一旦限定了聚类,就可以执行根据第一方面和第三方面的方法或任何其他已知的放射治疗计划。
63、请注意,在以上示例中,替换地,可以存在仅具有一(1)个靶的聚类,而其他两个聚类包括剩余靶。该方法将评估哪个聚类是给定所提供的限制——诸如一个聚类中的靶的最大数量和聚类的最大数量——的最优聚类。限制束可以取决于例如由治疗计划器指定的可用弧射束或诸如治疗时间限制的其他情况。
64、本文还公开了一种包括计算机可读装置的计算机程序产品,该计算机程序产品当在计算机中执行时将使计算机执行本文公开的任何方面或方法步骤。
65、本文还公开了一种编码有计算机可执行指令的非暂时性计算机可读介质,在计算机设备中运行时,计算机可执行指令将使该设备执行本公开的方法步骤或方面。
66、除了上面进一步公开的之外,本文还公开了一种计算机系统,包括处理器、存储器,其中,存储器包括根据上述的计算机程序产品或根据上述的非暂时性计算机可读介质。
67、在本公开中,将使用某些术语和技术规范,参考附图解释它们中的一些,并且在此解释和指定它们中的一些:
68、成本函数或成本
69、与放射疗法相关的术语成本函数或成本描述了获得的计划质量与期望的计划质量之间的距离或差异的度量。成本函数可以包括放射治疗计划的临床目标,并且表示计划期间优化过程的临界点。可以将各种变量添加到成本或成本函数,诸如非靶组织的暴露、暴露的非靶组织区域(enta)、mlc中的桥间隙开口和/或分段或弧射束之间的mlc或卧榻角度改变。这样的变量可能导致附加成本。成本或成本函数递送的值可以被视为治疗计划的质量指标。通常,放射治疗计划的成本函数经历优化过程。成本或成本函数可以基于剂量水平标准作为物理成本函数,或者可以基于生物标准作为生物成本函数。成本函数的目的通常是提供具有高度保形剂量分布而不照射暴露的非靶组织或有风险的器官的治疗计划。在许多解决方案中,通过寻找这种成本函数的最小值来优化成本函数或成本。成本、成本函数或enta成本可以是高度复杂的,但是由于本发明的核心不在于成本或成本函数确定,因此所提供的解释足以理解本文公开的方面。
70、成本函数可以包括用于治疗靶集合的弧路径的数量。通常,用于治疗的弧路径越多,成本越高,因为弧路径增加了治疗的时间。因此,如果可以用七(7)个弧路径和第一治疗计划实现一定的成本水平a,并且也可以仅用六(6)个弧路径和第二治疗计划实现相同的成本水平a,则具有六(6)个弧路径的第二治疗计划是有利的,并且因此应当接收比a低的总成本。可以以以下方式设计取决于具有单个输出值的弧路径的数量的成本函数:
71、令t为阈值,使得低于t的所有enta成本被视为相等的。令成本被定义为
72、
73、其中p是靶划分,n是弧路径的数量(至多99个)并且意味着将x舍入到整数部分之后的3个小数位。换句话说,该函数可以用公式表示如下:
74、成本的一个示例如下计算:首先,计算成本的enta部分的值。如果所得值低于阈值t,其中t大于或等于0,那么将值设定为精确地t。将值四舍五入到小数点后最多三位,并且然后将结果乘以100000。这保证我们具有带有两个结束零的整数。最后,将治疗计划中的弧路径的数量(少于100个)相加以获得总成本。选择具有最低总成本的靶划分作为最优靶划分。
75、替代地,考虑弧路径的数量的成本函数也可以通过以下方式设计:首先,如果划分的成本低于阈值t,其中t大于或等于0,则将该成本设置为精确地t。在步骤后,选择具有最低成本的靶划分。如果多个靶划分具有相同的成本,例如成本t,则按照最终治疗计划中的弧路径的数量对靶划分进行排序,并选择最终治疗计划中具有最低弧路径数量的治疗计划作为最优靶划分。
76、多叶片准直器
77、多叶片准直器(mlc)包括具有矩形开口的框架和沿着开口的相对侧彼此相邻放置的多个叶片对。叶片对中的两个叶片彼此相对放置并且可以移动使得它们可以完全关闭开口的一部分或暴露开口的该部分的全部或一部分。每个叶片对限定mlc的线性部分。存在用于在射束递送期间计算mlc的移动模式的各种技术。例如,在滑动窗口递送中,叶片在整个场上单向移动,其中选择相对叶片之间的距离,使得放射将在由注量图确定的时间量内在应当暴露于放射的区域中通过,同时在其他区域被阻挡。可以顺序递送多个滑动窗口叶片横扫(sweep)而不切断照射,从而产生叶片在治疗区域上来回移动的移动模式。
78、放射递送的另一示例是步进和发射(step and shoot)递送,在步进和发射递送期间,mlc的叶片是静态的,而放射射束或放射射束开启。
79、对于弧射束,当射束开启时,mlc的叶片通常可以在任何方向上移动。
80、mlc可以围绕射束中心轴旋转到不同的角度,以在给定患者几何形状的情况下以最合适的方式限制射束。mlc相对于射束中心轴的给定旋转被称为准直器角度。在不同机架角度下将mlc旋转到不同准直器角度也是可行的,因为患者几何形状将取决于射束方向和/或机架角度而改变。mlc还可以在静态射束的递送期间旋转,即,准直器角度可以是射束的递送时间、机架角度或累积监测单元(mu)的函数。在当今的常规实践中,准直器角度是手动选择的并且在整个弧或静态射束上保持恒定。
81、靶划分
82、本文中的靶划分可以意指独立于候选弧路径将靶分割成组。靶划分通常包括几个靶组。鉴于靶划分可因此针对靶集合和各种靶组而变化。因此,靶集合可以被分割成各种靶组,并且由此也可以被分割成各种靶划分。另外,靶划分还可以意指每个候选弧路径的靶的分割。靶划分通常包括靶组,由此每个靶是至少一个靶组的一部分,但是在一些情况下并且尤其是如果这导致较低的总成本或enta,也可以允许不是每个靶是至少一个靶组的一部分。通常,每个候选弧路径检查至少一个靶划分;然而,它可以是多于一个靶划分,并且这可以用本文公开的方法来指定。
83、候选弧路径
84、关于本文说明书的候选弧路径描述并意指mlc在患者上行进的路径,由于放射疗法系统的配置和/或设计,该路径通常以弧的形式。候选弧路径也以某种方式影响或决定潜在的机架角度、卧榻角度和/或甚至准直器角度。当治疗靶组时,选择用于治疗的相关候选弧路径是重要的,以便减少患者的enta成本并且以便提供放射治疗的有效计划。与候选弧路径相关的mlc开口和enta的相关成本与所选候选弧路径相关,并且在与候选弧路径相关的同时对靶的分组和靶划分进行迭代极大地改进了对患者和治疗效率的结果。选择靶划分或分组取决于所提供的候选弧路径。特定靶划分的质量可以取决于候选弧路径。可以经由治疗计划系统或经由诸如医务人员的物理人员来提供候选弧路径。通常,也允许是或被认为是本文公开的方法的候选弧路径偏离所提供的一个或多个候选弧路径一定程度。在一些情况下,候选弧路径可以对应于卧榻角度。本文中的当前候选弧路径还意味着当前被检查和/或计算和/或分析的候选弧路径。
85、弧射束
86、本文中的弧射束被认为是允许在沿着弧路径的轨迹的特定位置处通过mlc的放射射束。弧射束可以是在沿着轨迹的固定点处暂时生成的射束,或者它可以是在准直器叶片或准直器开口取决于靶而适配时沿着轨迹移动的连续弧射束。在一些情况下,弧射束是沿着mlc和弧路径或候选弧路径的轨迹以某些固定间隙生成的静态射束。弧射束也在本文的附图中图示。
87、根据第一方面、第二方面或第三方面的根据本发明的方法可以被结合到任何已知的治疗计划系统中,用于改进治疗计划并减少治疗计划器的负担。根据第一方面、第二方面或第三方面的方法可以彼此独立地在放射治疗计划中使用和应用,然而它们也可以彼此组合使用。
技术研发人员:安东·芬森,约翰·森德斯特龙,阿尔宾·弗雷德里克松,谢尔·埃里克松,塞西莉亚·巴蒂内利
技术所有人:光线搜索实验室公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除