一种电子凸轮控制的准直器系统及控制方法、电子设备与流程
本发明涉及电子凸轮控制的准直器,具体涉及一种电子凸轮控制的准直器系统及控制方法、电子设备。
背景技术:
1、在肿瘤放射治疗领域中,医用电子直线加速器作为使用率最高、应用最广的治疗设备发挥着不可或缺的关键作用,而其中准直器系统是决定放射治疗精度的关键部件之一。
2、半影的大小和剂量率分布是影像治疗效果的关键因素之一,半影主要分为几何半影和穿透半影两种。现有技术方案分为聚焦式和非聚焦式两种,其中聚焦式准直器钨屏蔽块为直线型截面,非聚焦式为圆弧型截面。聚焦式准直器的钨屏蔽块上设置有用于旋转限位的凸轮槽或弧形导轨,这使得在聚焦式准直器在切换不同规格的射野时,使钨屏蔽块会随着直线运动进行聚焦旋转摆动,以确保钨屏蔽块的边缘与等中心处既定辐射野边线和源点连线共面,这样可以最大幅度的避免因辐射光路上屏蔽材料厚度不等而导致的剂量率不均(穿透半影),但需要配套的凸轮槽或弧形导轨等机械结构,其结构复杂,故障率高,且准直系统占用空间大。非聚焦式准直器在切换不同规格的射野时,仅对钨屏蔽块进行平移的直线运动控制,由钨屏蔽块圆弧型截面与射束边界相切来保证射野边界,因辐射光路中屏蔽材料厚度不等区域较多,所以导致穿透半影区域相对聚焦式准直器更大。
3、出现几何半影是因为射线源点并不是一理想点,而是在出束位置具有一定的尺寸,从源点不同部位发出的射线在到达既定辐射野时存在一定的偏差,这种偏差导致在照射边缘形成几何半影。
4、尽管聚焦式准直器会有着更小的穿透半影分布,但是还是会受几何半影的影响。临床上一般通过放疗计划中精确计算出实际的放射源点,在准直器系统在安装和调试时以实际源点为参考点进行调整,从而修正几何半影。
5、综上所述,尽管聚焦式准直器有着更好的半影分布,但因其结构复杂、故障率较高,所以很多厂商退而求其次,选择稳定性更好但半影分布较差的非聚焦式准直器。聚焦式准直器会随着使用时间的增加,会受到机械磨损和累计误差增加等因素的影响,控制精准度还会随使用时间的增加变的越来越差,影响放疗精度和放疗结果。
6、因此,现有技术还有待进一步发展。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种电子凸轮控制的准直器系统及控制方法、电子设备,以解决现有技术存在的问题。
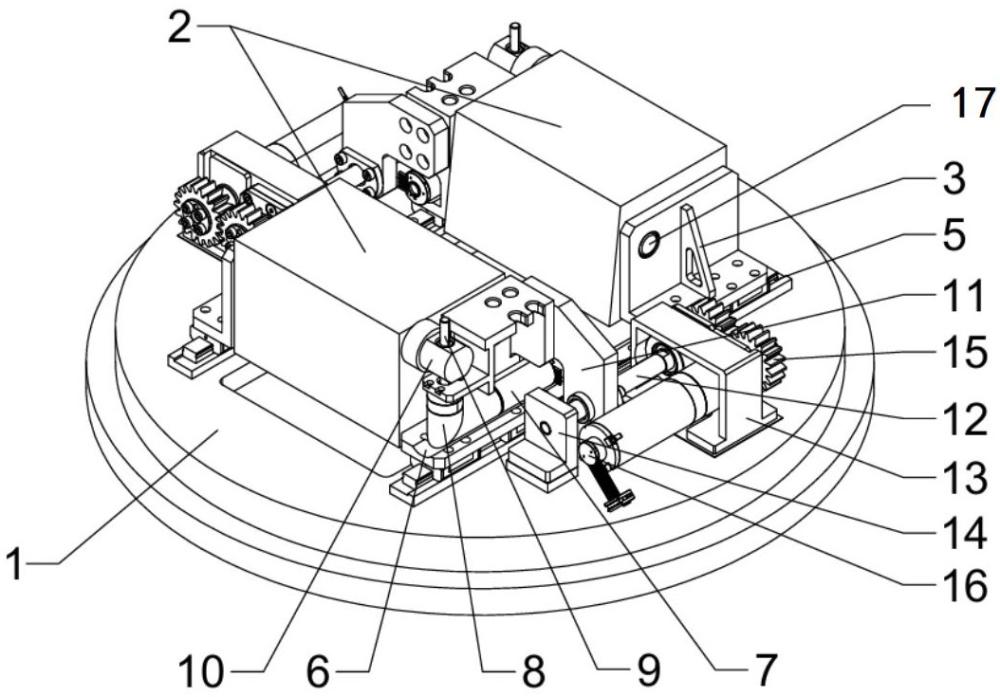
2、为达到上述技术目的,根据本发明的第一方面,本发明提供了一种电子凸轮控制的准直器系统,包括钨屏蔽块,在所述钨屏蔽块的一端设置有驱动装置;所述驱动装置包括旋转驱动伺服电机,所述旋转驱动伺服电机用于控制钨屏蔽块旋转。
3、具体的,所述驱动装置还包括第一丝杠,所述第一丝杠上连接有旋转滑动组件,所述旋转滑动组件靠近钨屏蔽块的一侧设置有容纳槽,所述容纳槽内安装有第一旋转轴承,所述第一旋转轴承与钨屏蔽块铰接,旋转滑动组件上下滑动时,进而带动钨屏蔽块和第一旋转轴承相对于旋转滑动组件转动和滑动,所述旋转驱动伺服电机用于通过旋转滑动组件和第一旋转轴承,控制钨屏蔽块绕第二旋转轴承的轴线旋转,也即绕第二旋转轴承安装孔的轴线旋转。
4、具体的,所述容纳槽为长条孔,所述容纳槽与第一旋转轴承滑动连接,所述旋转驱动伺服电机驱动第一丝杠转动时,在旋转滑动组件升降的同时,使第一旋转轴承不受水平方向的约束。
5、具体的,所述驱动装置还包括伞齿轮减速机,所述旋转驱动伺服电机的一侧通过伞齿轮减速机与第一丝杠连接,通过控制旋转驱动伺服电机的转动量,使所述第一丝杠通过旋转带动旋转滑动组件进行上下运动,从而控制钨屏蔽块的转动角度。
6、具体的,所述驱动装置还包括驱动支架,所述驱动支架通过第二旋转轴承与钨屏蔽块铰接,第二旋转轴承设置在第二旋转轴承安装孔中,所述驱动支架上设置有旋转驱动伺服电机,所述驱动支架的一侧连接传动板,所述传动板与第二丝杠连接,所述第二丝杠的一端设置有一组直齿轮,所述直齿轮的一侧连接直线驱动伺服电机,所述直线驱动伺服电机用于控制钨屏蔽块进行直线运动。
7、具体的,所述第二丝杠通过第一固定座与第二固定座固定连接在底板上。
8、具体的,在所述钨屏蔽块的另一侧设置有滑动装置,所述滑动装置包括第一支架,所述第一支架通过第二旋转轴承与钨屏蔽块相铰接,所述第一支架固定连接在直线导轨上方,使第一支架带动钨屏蔽块沿着导轨方向进行直线运动。
9、根据本发明的第二方面,提供一种电子凸轮控制的准直器控制方法,包括:
10、s100、获取目标射野,并根据所述目标射野计算钨屏蔽块的第一张开距离和第一旋转角度;
11、s200、利用电子凸轮技术使旋转驱动伺服电机和直线驱动伺服电机按照第一张开距离和第一旋转角度控制钨屏蔽块进行同步运动;
12、s300、获取epid上形成的实际射野;
13、s400、若实际射野与目标射野有差值,则根据实际射野和目标射野的差值得到射线源点的实际高度,并利用射线源点的实际高度计算钨屏蔽块的第二张开距离和第二旋转角度,并利用电子凸轮技术使旋转驱动伺服电机和直线驱动伺服电机按照第二张开距离和第二旋转角度控制钨屏蔽块进行同步运动,并跳转至s300;若实际射野与目标射野无差值,跳转s500;
14、s500、钨屏蔽块停止运动,准备出束。
15、具体的,当钨屏蔽块的上表面与水平面平行时,将钨屏蔽块的上表面所在的平面记为目标平面,所述射线源点的实际高度为射线源点到所述目标平面的垂直距离。
16、根据本发明的第三方面,提供一种电子设备,包括:存储器;以及处理器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时实现上述的电子凸轮控制的准直器控制方法。
17、有益效果:
18、本发明通过可编辑的电子凸轮控制,实现了钨屏蔽块运动的可编辑化,大大降低了安装调试要求,极大的提高了控制精度,进一步提高了放射治疗的效果,同时,本发明中电子凸轮控制的准直器系统,可在设备定期自检中自动修正聚焦偏摆弧度,消除长期使用带来的位置偏差,从而实现了钨屏蔽块的非线性运动控制,消除不同批次设备之间的装配公差差异造成的影响,很大程度上提高了本发明的智能化程度、可用性和可靠性。
技术特征:
1.一种电子凸轮控制的准直器系统,包括钨屏蔽块(2),其特征在于,在所述钨屏蔽块(2)的一端设置有驱动装置;所述驱动装置包括旋转驱动伺服电机(7),所述旋转驱动伺服电机(7)用于控制钨屏蔽块(2)旋转。
2.根据权利要求1所述的电子凸轮控制的准直器系统,其特征在于,所述驱动装置还包括第一丝杠(9),所述第一丝杠(9)上连接有旋转滑动组件(10),所述旋转滑动组件(10)靠近钨屏蔽块(2)的一侧设置有容纳槽(101),所述容纳槽(101)内安装有第一旋转轴承(4),所述第一旋转轴承(4)与钨屏蔽块(2)铰接,旋转滑动组件(10)上下滑动时,进而带动钨屏蔽块(2)和第一旋转轴承(4)相对于旋转滑动组件(10)转动和滑动,所述旋转驱动伺服电机(7)用于通过旋转滑动组件(10)和第一旋转轴承(4),控制钨屏蔽块(2)绕第二旋转轴承(17)的轴线旋转,也即绕第二旋转轴承安装孔(61)的轴线旋转。
3.根据权利要求2所述的电子凸轮控制的准直器系统,其特征在于,所述容纳槽(101)为长条孔,所述容纳槽(101)与第一旋转轴承(4)滑动连接,所述旋转驱动伺服电机(7)驱动第一丝杠(9)转动时,在旋转滑动组件(10)升降的同时,使第一旋转轴承(4)不受水平方向的约束。
4.根据权利要求2所述的电子凸轮控制的准直器系统,其特征在于,所述驱动装置还包括伞齿轮减速机(8),所述旋转驱动伺服电机(7)的一侧通过伞齿轮减速机(8)与第一丝杠(9)连接,通过控制旋转驱动伺服电机(7)的转动量,使所述第一丝杠(9)通过旋转带动旋转滑动组件10进行上下运动,从而控制钨屏蔽块(2)的转动角度。
5.根据权利要求2所述的电子凸轮控制的准直器系统,其特征在于,所述驱动装置还包括驱动支架(6),所述驱动支架(6)通过第二旋转轴承(17)与钨屏蔽块(2)铰接,第二旋转轴承(17)设置在第二旋转轴承安装孔(61)中,所述驱动支架(6)上设置有旋转驱动伺服电机(7),所述驱动支架(6)的一侧连接传动板(11),所述传动板(11)与第二丝杠(12)连接,所述第二丝杠(12)的一端设置有一组直齿轮(15),所述直齿轮(15)的一侧连接直线驱动伺服电机(16),所述直线驱动伺服电机(16)用于控制钨屏蔽块(2)进行直线运动。
6.根据权利要求5所述的电子凸轮控制的准直器系统,其特征在于,所述第二丝杠(12)通过第一固定座(13)与第二固定座(14)固定连接在底板(1)上。
7.根据权利要求2所述的电子凸轮控制的准直器系统,其特征在于,在所述钨屏蔽块(2)的另一侧设置有滑动装置,所述滑动装置包括第一支架(3),所述第一支架(3)通过第二旋转轴承(17)与钨屏蔽块(2)相铰接,所述第一支架(3)固定连接在直线导轨(5)上方,使第一支架(3)带动钨屏蔽块(2)沿着导轨方向进行直线运动。
8.一种电子凸轮控制的准直器控制方法,其特征在于,包括:
9.根据权利要求8所述的电子凸轮控制的准直器控制方法,其特征在于,当钨屏蔽块(2)的上表面与水平面平行时,将钨屏蔽块(2)的上表面所在的平面记为目标平面,所述射线源点的实际高度为射线源点到所述目标平面的垂直距离。
10.一种电子设备,其特征在于,包括:
技术总结
本发明提供了一种电子凸轮控制的准直器系统及控制方法、电子设备,包括:在钨屏蔽块的一端设置有驱动装置,驱动装置包括旋转驱动伺服电机,用于控制钨屏蔽块旋转,提高了控制精度,所述方法包括获取目标射野,并根据目标射野计算钨屏蔽块的第一张开距离和第一旋转角度;利用电子凸轮技术使钨屏蔽块按照第一张开距离和第一旋转角度控制钨屏蔽块进行同步运动,得到实际射野;根据实际射野和目标射野的差值得到射线源点的实际高度,并利用射线源点的实际高度计算钨屏蔽块的第二张开距离和第二旋转角度,并按照第二张开距离和第二旋转角度控制钨屏蔽块进行同步运动,可自动修正聚焦偏摆弧度,消除长期使用造成的位置偏差。
技术研发人员:杨滔,刘松,刘贤洪
受保护的技术使用者:中玖闪光医疗科技有限公司
技术研发日:
技术公布日:2024/12/5
技术研发人员:杨滔,刘松,刘贤洪
技术所有人:中玖闪光医疗科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除