一种带有便拆装人机显示器的工业机器人的制作方法
本发明涉及机器人,尤其公开了一种带有便拆装人机显示器的工业机器人。
背景技术:
1、在工业生产中,为了优化物料运输和节省存储空间,物料码垛成为了一个重要环节。然而,当前的码垛方式存在显著缺陷:人工手工码垛不仅成本高、劳动强度大、效率低,而且难以保证码垛质量;堆垛机自动化码垛虽然效率较高,但在高速运行时稳定性较差,容易发生位置偏移,影响码垛质量,因此,我们迫切需要一种更加高效的解决方案,以在保证码垛质量的同时,提高码垛效率。另外,现有码垛机的显示器控制系统拆装结构复杂,一旦发生故障,拆装效率低下,给维护工作带来极大不便。因此,在寻求高效码垛方案的同时,我们也需要考虑改进码垛机的拆装设计,以提高维护效率和使用便捷性。
技术实现思路
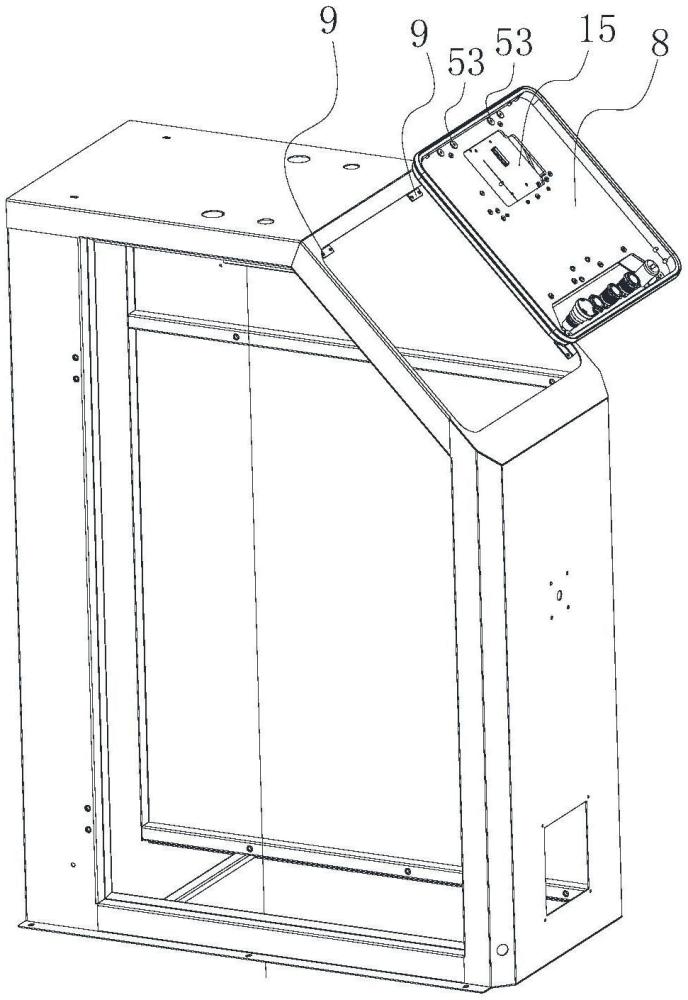
1、为实现上述目的,本发明的一种带有便拆装人机显示器的工业机器人,包括固定座、设置在固定座上的机架以及安装在机架上的机械手;所述机架包括安装在机架上的控制系统,机械手与控制系统电性连接,控制系统包括显示器,显示器与机架经由紧固装置可拆卸安装;所述机架上开设用于安装显示器的安装框,安装框具有环形框架及由环形框架围设而成的穿孔,环形框架设有延伸入穿孔内的紧固块,紧固块上设有透孔,显示器具有主体部及设置在主体部上的触控屏,主体部容设在穿孔内并压持在紧固块上,触控屏压持在环形框架上,主体部上设有与紧固块相适配安装的螺纹盲孔,外部螺栓贯穿紧固块上的透孔与显示器上的螺纹盲孔相螺接将显示器安装至安装框上。
2、机架作为支撑和控制系统的载体,其坚固的机架设计保证了工业机器人在运行过程中的稳定性,同时,控制系统的精确控制也确保了机械手动作的准确性和可靠性。通过显示器精确调试,可以确保机械手在操作过程中遵循预设的安全规程,减少因人为操作失误导致的安全事故。由于显示器与机架之间通过紧固装置实现可拆卸安装,当显示器需要维护、更换或升级时,可以方便地拆卸下来,无需对整个工业机器人进行大规模拆解,从而提高了维护效率和降低了维护成本。可拆装的显示器设计使得用户可以根据实际需求,灵活更换不同规格、不同功能的显示器通过安装框、环形框架、紧固块以及螺纹盲孔等结构设计,使得显示器的安装过程变得简单快捷,只需将显示器主体部放入穿孔内,通过螺栓与紧固块上的透孔和显示器上的螺纹盲孔螺接即可,无需复杂的安装步骤和工具。以适应不同的工作环境和任务需求,增强了工业机器人的适应性和灵活性。触控屏直接压持在环形框架上,不仅保证了安装的稳固性,还使得用户能够更加方便地操作触控屏,提高了人机交互的便捷性和用户体验。
3、所述紧固块的数量为多个,多个紧固块围绕主体部设置,环形框架与紧固块为一体式结构,由于紧固块与环形框架为一体,安装时无需单独安装每个紧固块,只需将显示器主体部放入穿孔内,然后通过螺栓一次性完成与所有紧固块的连接,大大提高了安装效率。直角紧固块的设计使得其在与显示器和机架连接时,能够形成更加稳固的支撑结构。这种结构有助于减少显示器在振动或冲击下的晃动,确保其在工作过程中的稳定性。直角紧固块是一种具有直角形状的紧固元件,它通常由金属材质制成,如钢或铝合金。直角紧固块的设计使其与构件之间的接触面积大,连接紧密,有效防止了滑移现象的发生。
4、所述触控屏包括显示面板、遮盖显示面板前后两侧的防爆面板以及主体部,主体部、显示面板上均设有多组通孔,防爆面板靠近显示面板的一侧端面设有多组限位孔,外部螺栓贯穿主体部、显示面板上的通孔与防爆面板上的限位孔相螺接,主体部、防爆面板夹持显示面板。防爆面板的引入显著提高了显示器的防爆性能。在工业生产环境中,尤其是涉及易燃易爆物质的场合,这一设计能够防止因意外冲击或爆炸导致显示器破裂,进而引发更大的安全事故。防爆面板能够有效地吸收和分散冲击力,保护内部的显示面板和主体部不受损害。通过外部螺栓贯穿主体部、显示面板上的通孔与防爆面板上的限位孔相螺接的方式,实现了主体部、防爆面板对显示面板的稳固夹持。这种夹持结构不仅确保了显示器的稳固性,还使得各个部件之间的连接更加紧密,减少了因振动或冲击导致的松动和脱落的风险。
5、固定座设有可拆卸的配重块,固定座设有用于容设配重块的容置盲槽,容置盲槽自固定座的底面凹设而成。配重块用于增大固定座接触面积,配重块的设计有助于减少机器人在工作过程中因受力不均或外部因素(如风力、地面不平整等)引起的摇晃和振动,这不仅可以保护机器人内部的精密部件免受损坏,还可以提高机器人操作的准确性和稳定性。所述配重块包括伸缩臂,固定座上设有容置盲槽,伸缩臂伸缩设于容置盲槽内且经由紧固件与固定座可拆卸连接;伸缩臂突伸出固定座的长度大于机械手的单次移动距离或/和机械手的移动路径的半径。
6、所述机械手包括与机架相连接的升降杆、与升降杆相连接的转动组件,所述转动组件包括第一转动组、第二转动组、第三转动组、第一机臂以及第二机臂,第一转动组包括第一转轴和第二转轴,第二转动组包括第三转轴和第四转轴,第三转动组包括第五转轴、第六转轴以及第七转轴,第一转轴的输出端与升降杆转动连接,第二转轴的输出端与第一转轴的主体相连接,第二转轴的主体与第一转轴的主体转动连接,所述第二转轴的轴线与第一转轴的轴线相垂直。在实际应用中,第一转轴的输出端与升降杆转动连接,第一转轴的主体能够相对升降杆进行360°旋转并带动所有的转轴和机臂同步转动;第二转轴的输出端与第一转轴的主体相连接,第二转轴的轴线与第一转轴的轴线相垂直,第二转轴的主体能够相对第一转轴主体360°旋转并带动其余转轴和机臂同步转动。
7、升降杆的升降端升降以驱动转动组件升降,升降杆包括升降驱动件和升降筒体,升降筒体具有用于容设升降驱动件的内腔体;升降杆的升降功能使得转动组件能够在垂直方向上自由移动,从而极大地扩展了机械手的作业范围。无论是在高处的货架取物,还是在低洼的工作区域进行操作,机械手都能轻松应对,无需更换设备或调整生产线布局。结合升降和转动功能,机械手能够实现更加复杂和灵活的运动轨迹。这种多自由度的运动能力使得机械手能够更准确地定位到目标位置,以更合适的姿态执行任务,如堆垛、上下料等。
8、所述第二转轴的主体与第一机臂固定连接,第一机臂远离第二转轴的一端与第三转轴的主体固定连接,第二转轴的轴线与第三转轴的轴线均与第一机臂的轴线相垂直,第三转轴的输出端与第四转轴的的输出端相连接,第三转轴的主体与第四转轴的主体转动连接,第四转轴与第三转轴的主体同轴转动连接。
9、第二转轴的主体与第一机臂固定连接,第一机臂远离第二转轴的一端与第三转轴的主体固定连接,这种连接方式确保了第二转轴和第三转轴在转动时能够带动第一机臂一起运动,第一机臂的设置进一步扩展机械手的运动范围。第三转轴的输出端与第四转轴的的输出端相连接,第四转轴与第三转轴的主体是同轴转动连接的,这意味着当第三转轴进行360°转动时,第四转轴也会以相同的轴线进行360°转动同时带动其余转轴和机臂同步转动。
10、所述第二机臂与第四转轴的主体固定连接,第二机臂远离第四转轴的一端与第五转轴的主体固定连接,第四转轴的轴线与第五转轴的轴线均与第二机臂的轴线相垂直,第五转轴的输出端与第六转轴的主体转动连接,第五转轴的轴线与第六转轴的轴线相垂直,第六转轴的输出端与第七转轴的主体转动连接,第六转轴的轴线与第七转轴的轴线相垂直。
11、第二机臂与第四转轴的主体固定连接,第二机臂远离第四转轴的一端与第五转轴的主体固定连接,这种连接方式确保了第四转轴和第五转轴在转动时能够带动第二机臂一起运动,第二机臂的设置进一步扩展机械手的运动范围。第五转轴的输出端与第六转轴的主体转动连接,第五转轴的轴线与第六转轴的轴线相垂直,这种连接方式使得机械手能够在垂直的轴线上进行复合运动,增加了运动的复杂性和精确性,第五转轴的输出端能够相对于第六转轴的进行360°转动,同时带动其余转轴和机臂同步转动。第六转轴的输出端与第七转轴的主体转动连接,第六转轴的轴线与第七转轴的轴线相垂直,这种设计进一步扩展了机械手的运动自由度,第六转轴能够相对于第七转轴的主体进行360°转动同时带动其余转轴和机臂同步转动。
12、所述机械手还包括设置在第七转轴输出端的吸取组件,吸取组件包括与第七转轴输出端连接的连接臂、连接臂远离第七转轴输出端的另一端连接有吸料件,所述吸料件的吸料面设有多个与吸料件连通的吸孔。当吸料件与工件接触时,通过外部气源(如真空泵)产生负压,使得吸孔内的空气被抽出,从而在吸料面和工件之间形成一定的真空度,这种真空度产生的吸附力将工件牢固地吸附在吸料面上,实现工件的吸取。
13、所述第一转轴包括转轴模组、罩设在转轴模组外的壳体,转轴模组包括与壳体连接的电机、谐波减速机以及传动组件,谐波减速机转轴与电机输出轴经由传动组件传动连接,谐波减速机用于降低电机转速和增大电机转矩;第二转轴、第三转轴、第四转轴、第五转轴、第六转轴及第七转轴结构与第一转轴结构相同。谐波减速机是一种利用柔性齿轮传动原理的减速装置,具有高精度、高减速比、大扭矩容量和零背隙等优点。它能够将电机的高速低扭矩输出转换为低速高扭矩输出,满足机械手在不同工况下对速度和力量的需求。传动组件可为齿轮组,传动组件是连接电机输出轴和谐波减速机转轴的桥梁,它负责将电机的旋转动力传递给谐波减速机,并确保两者之间的同步运转。传动组件可能包括齿轮、皮带、链条等不同的传动方式,具体取决于设计要求和空间限制。
14、所述壳体包括机壳、与机壳可拆卸连接的转轴封盖,转轴封盖与机壳一端连接,转轴封盖与机壳的连接口为斜开口,所述转轴封盖上设有安装槽,机壳上设有与安装槽相适配的限位槽,外部螺栓贯穿转轴封盖上的安装槽螺接到机壳上的限位槽。机壳与转轴封盖采用可拆卸连接方式,这种设计使得在需要维护或更换内部组件时,能够方便地打开壳体,而无需对整个机械手进行拆解。这不仅提高了维护效率,还降低了维护成本。斜开口可能使得转轴封盖在安装和拆卸时能够更容易地对准和固定,减少了操作难度。外部螺栓贯穿转轴封盖上的安装槽螺接到机壳上的限位槽中,进一步增强了转轴封盖与机壳之间的连接强度和稳定性。
15、所述第一机臂与第二机臂为可伸缩结构,控制系统控制第一机臂与第二机臂的伸缩。吸料件内设有激光位移传感器,激光位移传感器采用激光三角检测法,通过发射激光束并接收被测物体表面反射的光信号来计算距离。这种方法具有高精度、非接触和快速响应的特点,激光位移传感器用于测量外部工件与机械手之间的距离,得到该距离信息后,可以调整机械手的伸缩状态以及转动姿态。
16、升降杆包括升降支架以及设置在升降支架上的升降螺杆,升降螺杆的外部安装有传动块,所述传动块的边侧安装设置有连接块,所述连接块的侧端紧固安装有升降电机。在传动块侧边设置连接块,连接块的设计应考虑到强度和刚度要求,以承受升降过程中产生的各种力和力矩,使得机械手在进行码垛作业的同时更加平稳。
17、本发明的有益效果:本发明通过固定座、设置在固定座上的机架以及安装在机架上的机械手;所述机架包括安装在机架上的控制系统,机械手与控制系统电性连接,通过控制系统驱动机械手进行多方位移动来完成码垛作业,多个转轴连接的机械手设计使得机械手具有极高的灵活度,机械手通过精密的传动机构和控制系统驱动,能够实现多轴、多维度的灵活运动。这种设计使得机械手能够轻松应对各种复杂的码垛布局,包括但不限于多层、多角度、异形堆垛等;机械手的关节处采用多个转轴连接,不仅提高了机械手的灵活度,还使得其动作更加平滑、精确。
18、控制系统包括显示器,显示器与机架经由紧固装置可拆卸安装,为了提高设备的可维护性和易用性,本发明采用了显示器与机架经由紧固装置可拆卸安装的设计。这种设计使得在需要维修或更换显示器时,操作人员可以方便地将其从机架上拆卸下来,而无需对整个设备进行拆解或移动。同时,也便于根据实际需要更换不同尺寸、分辨率或功能的显示器,以适应不同的应用场景和操作需求。
技术研发人员:陈敦坚,戚广图,周春翔
技术所有人:深圳市华盛控科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除