一种用于机器人零部件的焊接装置的制作方法
本发明涉及焊接装置的,具体涉及一种用于机器人零部件的焊接装置。
背景技术:
1、机器人零部件在焊接装置进行焊接时,尤其是规则的圆形零部件,只需要使零部件旋转,通过焊枪即能够对其圆周焊接,当需要焊接其它直径的零部件时,则需要对焊枪位置进行适应性的调整,但是现有技术不便于对焊枪进行多角度调整,而且焊枪在焊接零部件后,其上会熔融有焊渣,若不及时进行清理,则影响焊枪后续的使用。
技术实现思路
1、本发明的目的在于提供一种用于机器人零部件的焊接装置,以克服现有技术中的上述缺陷。
2、一种用于机器人零部件的焊接装置,包括工作台、旋转驱动机构、位置调节机构及清理机构,所述工作台上转动连接有通过旋转驱动机构进行驱动的转台;
3、所述位置调节机构设于工作台上的支撑杆上并用于调整其上焊枪的位置;
4、所述清理机构设于焊枪外侧并用于对焊枪上的焊渣进行清理。
5、优选地,所述转台的顶部设有定位座,所述定位座的中间设有定位销,所述定位座的底部设有气缸一,气缸一的活塞杆上端设有压板。
6、优选地,所述旋转驱动机构包括驱动电机、齿轮一及齿轮二,所述驱动电机安装于工作台底部的电机架上,所述驱动电机的输出轴上安装有齿轮一,所述齿轮一与转台下端的齿轮二之间啮合。
7、优选地,所述位置调节机构包括管夹一、固定座、气缸二及管夹三,所述管夹一通过螺栓夹持于支撑杆上,所述管夹一的侧面设有连接杆一,所述固定座的底部设有管夹二,所述管夹二通过螺栓夹持于连接杆一上,所述气缸二安装于固定座的侧面且其活塞杆端部设有与固定座上滑轨滑动连接的滑块,所述管夹三通过螺栓夹持于滑块的连接杆二上,管夹三上通过螺栓还夹持有连接杆三,所述连接杆三端部的管夹四通过螺栓夹持所述焊枪。
8、优选地,所述清理机构包括移动电机、驱动丝杆、移动筒及环体,所述移动电机安装于焊枪外侧的连接板上且其输出轴上连接有驱动丝杆,所述移动筒套设于焊枪上且其一端通过丝杆螺母与驱动丝杆螺旋连接,所述移动筒的另一端设有与连接板上导向杆滑动连接的活塞,所述导向杆上固定有弧形筒体,所述活塞位于弧形筒体中,所述环体套设于焊枪上并位于移动筒中,所述环体中转动连接有叶轮,所述叶轮的底部通过螺丝连接的底板,沿底板的下侧圆周均布有若干安装架,每个安装架中均设有刮渣组件,所述弧形筒体下端通过伸缩软管与环体的进气孔连接,环体上还设有排气孔。
9、优选地,所述刮渣组件包括刮刀、滑杆及弹簧,所述刮刀两侧的连接耳分别滑动连接于安装架两侧的滑杆上,所述滑杆端部与安装架内壁上的内伸板连接,所述弹簧套设于滑杆上并位于安装架与连接耳之间。
10、优选地,所述刮刀的端部设有与焊枪的外侧斜度配合的斜刃。
11、本发明具有如下优点:
12、本发明在使用时,机器人零部件安装在转台的定位座上并通过气缸一及压板进行固定,焊枪通过位置调节机构的气缸二及多个管夹,从而能够进行多个角度及位置的调整,使焊枪适应不同的焊接要求,焊枪上设置的清理机构,通过移动筒带动活塞在弧形筒体中移动,压缩空气对叶轮进行冲击,使刮渣机构上的刮刀能够旋转对焊枪外壁进行清理,同时能够实时适应焊枪外壁斜度的变化,使焊枪外壁更高效彻底的刮渣。
技术特征:
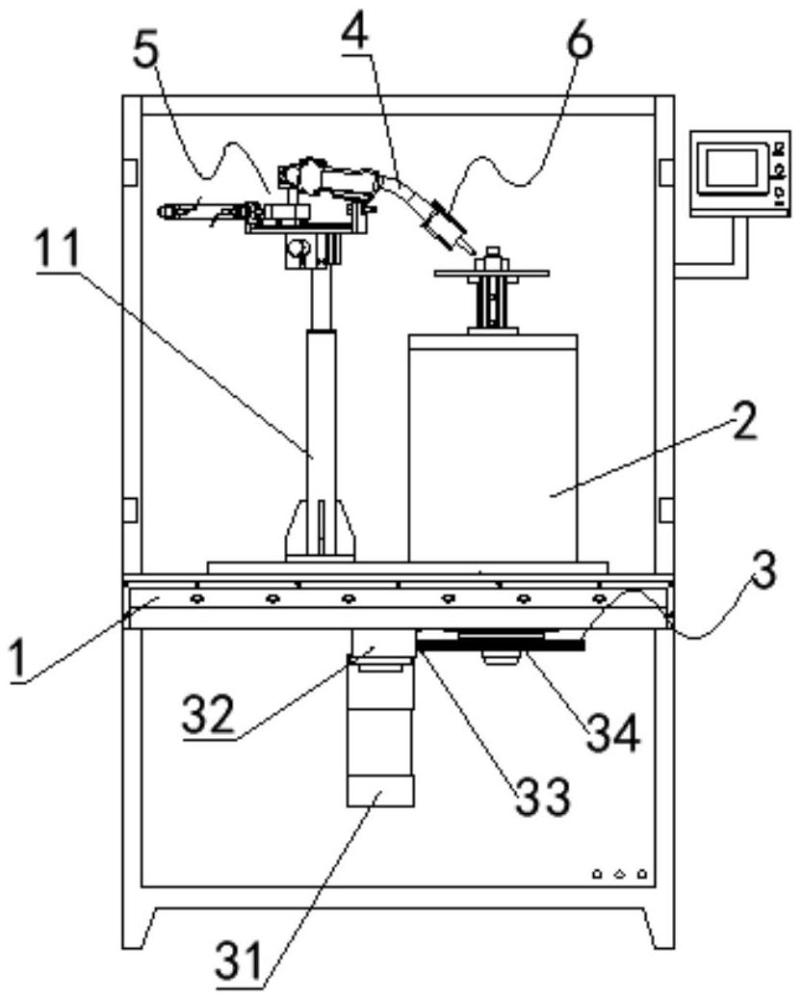
1.一种用于机器人零部件的焊接装置,其特征在于:包括工作台(1)、旋转驱动机构(3)、位置调节机构(5)及清理机构(6),所述工作台(1)上转动连接有通过旋转驱动机构(3)进行驱动的转台(2);
2.根据权利要求1所述的一种用于机器人零部件的焊接装置,其特征在于:所述转台(2)的顶部设有定位座(21),所述定位座(21)的中间设有定位销(22),所述定位座(21)的底部设有气缸一(23),气缸一(23)的活塞(65)杆上端设有压板(24)。
3.根据权利要求1所述的一种用于机器人零部件的焊接装置,其特征在于:所述旋转驱动机构(3)包括驱动电机(31)、齿轮一(33)及齿轮二(34),所述驱动电机(31)安装于工作台(1)底部的电机架(32)上,所述驱动电机(31)的输出轴上安装有齿轮一(33),所述齿轮一(33)与转台(2)下端的齿轮二(34)之间啮合。
4.根据权利要求1所述的一种用于机器人零部件的焊接装置,其特征在于:所述位置调节机构(5)包括管夹一(51)、固定座(53)、气缸二(531)及管夹三(55),所述管夹一(51)通过螺栓夹持于支撑杆(11)上,所述管夹一(51)的侧面设有连接杆一(52),所述固定座(53)的底部设有管夹二(54),所述管夹二(54)通过螺栓夹持于连接杆一(52)上,所述气缸二(531)安装于固定座(53)的侧面且其活塞(65)杆端部设有与固定座(53)上滑轨滑动连接的滑块(532),所述管夹三(55)通过螺栓夹持于滑块(532)的连接杆二(56)上,管夹三(55)上通过螺栓还夹持有连接杆三(57),所述连接杆三(57)端部的管夹四(58)通过螺栓夹持所述焊枪(4)。
5.根据权利要求1所述的一种用于机器人零部件的焊接装置,其特征在于:所述清理机构(6)包括移动电机(61)、驱动丝杆(63)、移动筒(64)及环体(67),所述移动电机(61)安装于焊枪(4)外侧的连接板(62)上且其输出轴上连接有驱动丝杆(63),所述移动筒(64)套设于焊枪(4)上且其一端通过丝杆螺母与驱动丝杆(63)螺旋连接,所述移动筒(64)的另一端设有与连接板(62)上导向杆(621)滑动连接的活塞(65),所述导向杆(621)上固定有弧形筒体(66),所述活塞(65)位于弧形筒体(66)中,所述环体(67)套设于焊枪(4)上并位于移动筒(64)中,所述环体(67)中转动连接有叶轮(68),所述叶轮(68)的底部通过螺丝连接的底板(681),沿底板(681)的下侧圆周均布有若干安装架(682),每个安装架(682)中均设有刮渣组件(69),所述弧形筒体(66)下端通过伸缩软管(661)与环体(67)的进气孔连接,环体(67)上还设有排气孔。
6.根据权利要求5所述的一种用于机器人零部件的焊接装置,其特征在于:所述刮渣组件(69)包括刮刀(691)、滑杆(693)及弹簧(695),所述刮刀(691)两侧的连接耳(692)分别滑动连接于安装架(682)两侧的滑杆(693)上,所述滑杆(693)端部与安装架(682)内壁上的内伸板(694)连接,所述弹簧(695)套设于滑杆(693)上并位于安装架(682)与连接耳(692)之间。
7.根据权利要求6所述的一种用于机器人零部件的焊接装置,其特征在于:所述刮刀(691)的端部设有与焊枪(4)的外侧斜度配合的斜刃。
技术总结
本发明公开了一种用于机器人零部件的焊接装置,涉及焊接装置的技术领域,包括工作台、旋转驱动机构、位置调节机构及清理机构,所述工作台上转动连接有通过旋转驱动机构进行驱动的转台,位置调节机构设于工作台上的支撑杆上并用于调整其上焊枪的位置,清理机构设于焊枪外侧并用于对焊枪上的焊渣进行清理。本发明的焊枪通过位置调节机构的气缸二及多个管夹,从而能够进行多个角度及位置的调整,使焊枪适应不同的焊接要求,焊枪上设置的清理机构,通过移动筒带动活塞在弧形筒体中移动,压缩空气对叶轮进行冲击,使刮渣机构上的刮刀能够旋转对焊枪外壁进行清理,同时能够实时适应焊枪外壁斜度的变化,使焊枪外壁更高效彻底的刮渣。
技术研发人员:周建
受保护的技术使用者:芜湖吾晞信息科技有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:周建
技术所有人:芜湖吾晞信息科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除