深水绞吸清淤机器人的制作方法
本发明涉及清淤,特别是深水绞吸清淤机器人。
背景技术:
1、在现代深水区域的清淤作业中,我们常采用高科技清淤机器人来替代传统的人工下井作业,这不仅大幅提升了作业效率,也显著降低了作业风险。这些先进的水下清淤机器人,搭载精密的绞龙系统,能够对深水区域内长期沉积的顽固淤泥进行有效的破碎和收集,将之汇聚至机器人中心位置的吸污口,从而通过高效的抽吸机制,实现淤泥的彻底清除。
2、然而,即便是这些技术领先的清淤机器人,在面对吸污口位移路径上的淤泥时,也面临着一项技术挑战。绞龙在破碎过程中可能难以触及所有区域,导致存在一定的破碎盲区。这些盲区内的板结淤泥,不仅难以通过吸污口进行有效抽吸,而且一旦被吸入,还可能引起吸污口的堵塞,影响清淤作业的连续性和效率,同时可能还会吸入石子,石子被吸入泵内,会对泵内造成极大伤害。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述或现有技术中存在的问题,提出了本发明。
3、因此,本发明的目的是提供深水绞吸清淤机器人,其能够通过前置破泥组件之间增设后置破碎件,利用后置破碎组件对吸污口移动路径上的淤泥进行二次破碎,以增强对淤泥的破碎程度。
4、为解决上述技术问题,本发明提供如下技术方案:深水绞吸清淤机器人,其包括安装固定单元,包括承载单元,包括安装组件、设置于安装组件一端的前置破泥组件、设置于安装组件底部的驱动组件、设置于驱动组件底部的后置破泥组件,以及设置于安装组件底部的触底组件,设置于触底组件顶部的吸污组件,以及设置于吸污组件内部的切割组件;
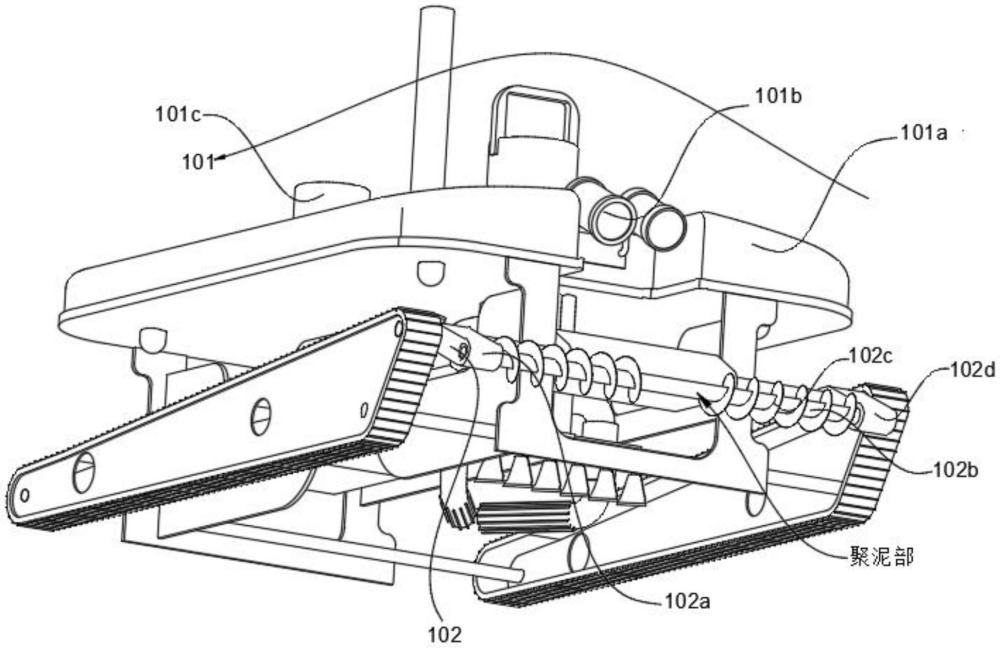
5、安装组件包括机体,与机体转动连接的超声波探测器,以及设置于机体顶部的控制器。
6、作为本发明深水绞吸清淤机器人的一种优选方案,其中:前置破泥组件包括设置于机体前端的连接块、与所连接块一侧转动连接的转轴、设置于转轴外侧的一组破碎刀,以及设置于转轴一端的伺服电机。
7、作为本发明深水绞吸清淤机器人的一种优选方案,其中:驱动组件包括与机体固定连接的液压杆、与液压杆底部固定连接的安装架,以及设置于安装架一侧的一组限位杆。
8、作为本发明深水绞吸清淤机器人的一种优选方案,其中:后置破泥组件包括与安装架底部固定连接的三组支撑杆,与支撑杆底部固定连接的铲泥刀。
9、作为本发明深水绞吸清淤机器人的一种优选方案,其中:触底组件包括与限位杆一端滑动的连接管、设置于连接管一端的形管,设置于形管外壁的扭簧,设置于连接管另一端的输送管,以及设置于形管外壁的切割条。
10、作为本发明深水绞吸清淤机器人的一种优选方案,其中:吸污组件包括设置于机体顶部的吸污管,吸污管底部贯穿机体,吸污管贯穿机体的一端螺纹连接的分解罐。
11、作为本发明深水绞吸清淤机器人的一种优选方案,其中:切割组件包括设置于分解罐底部的伺服电机,设置于伺服电机一端的转轴,转轴一端贯穿分解罐底部,转轴顶部固定安装有顶杆,顶杆外壁套接有固定杆,固定杆外壁嵌套有复位弹簧,转轴外壁固定安装有限位盘,转轴外壁滑动安装有安装盘,安装盘外壁设置有三组刀片,安装盘内壁安装有限位块,转轴与固定杆直径相同。
12、作为本发明深水绞吸清淤机器人的一种优选方案,其中:破碎刀相对安装,破碎刀以转轴为轴心环绕设置。
13、作为本发明深水绞吸清淤机器人的一种优选方案,其中:连接管外壁均开设有限位槽,限位杆一端滑动安装在限位槽内部。
14、作为本发明深水绞吸清淤机器人的一种优选方案,其中:分解罐底部对称开设有一组第一螺纹孔,分解罐顶部开设有第二螺纹孔,第一螺纹孔与输送管螺纹连接,第二螺纹孔与吸污管螺纹连接。
15、本发明的有益效果:本发明通过设置承载单元,安装组件的设置方便了前置破泥组件和后置破泥组件的设置,前置破泥组件可以对板结的淤泥进行破碎,同时后置破泥组件可以对破碎后的淤泥进行二次破碎,这样可以避吸污口被体积较大的淤泥堵塞的情况,同时触底组件的设置位于淤泥内,以减少水流进入提高对淤泥的抽吸效率,吸污组件的设置可以对破碎后的淤泥进行吸取,同时切割组件可以对淤泥内部的塑料袋以及塑料制品进行切割,避免这些塑料制品对吸污设备造成堵塞的情况。
技术特征:
1.深水绞吸清淤机器人,其特征在于:包括,
2.如权利要求1所述的深水绞吸清淤机器人,其特征在于:所述前置破泥组件(102)包括设置于所述机体(101a)前端的连接块(102a)、与所连接块(102a)一侧转动连接的转轴(102b)、设置于所述转轴(102b)外侧的一组破碎刀(102c),以及设置于所述转轴(102b)一端的伺服电机(102d)。
3.如权利要求2所述的深水绞吸清淤机器人,其特征在于:所述驱动组件(103)包括与机体(101a)固定连接的液压杆(103a)、与所述液压杆(103a)底部固定连接的安装架(103b),以及设置于所述安装架(103b)一侧的一组限位杆(103c)。
4.如权利要求3所述的深水绞吸清淤机器人,其特征在于:所述后置破泥组件(104)包括与所述安装架(103b)底部固定连接的三组支撑杆(104a),与所述支撑杆(104a)底部固定连接的铲泥刀(104b)。
5.如权利要求4所述的深水绞吸清淤机器人,其特征在于:所述触底组件(105)包括与所述限位杆(103c)一端滑动的连接管(105a)、设置于所述连接管(105a)一端的l形管(105b),设置于所述l形管(105b)外壁的扭簧(105c),设置于所述连接管(105a)另一端的输送管(105d),以及设置于所述l形管(105b)外壁的切割条(105e)。
6.如权利要求5所述的深水绞吸清淤机器人,其特征在于:所述吸污组件(106)包括设置于所述机体(101a)顶部的吸污管(106a),所述吸污管(106a)底部贯穿机体(101a),所述吸污管(106a)贯穿机体(101a)的一端螺纹连接的分解罐(106b)。
7.如权利要求6所述的深水绞吸清淤机器人,其特征在于:所述切割组件(107)包括设置于所述分解罐(106b)底部的伺服电机(107a),设置于所述伺服电机(107a)一端的转轴(107b),所述转轴(107b)一端贯穿分解罐(106b)底部,所述转轴(107b)顶部固定安装有顶杆(107c),所述顶杆(107c)外壁套接有固定杆(107d),所述固定杆(107d)外壁嵌套有复位弹簧(107e),所述转轴(107b)外壁固定安装有限位盘(107f),所述转轴(107b)外壁滑动安装有安装盘(107g),所述安装盘(107g)外壁设置有三组刀片(107h),所述安装盘(107g)内壁安装有限位块(107i),所述转轴(107b)与固定杆(107d)直径相同。
8.如权利要求2~7任一所述的深水绞吸清淤机器人,其特征在于:所述破碎刀(102c)相对安装,所述破碎刀(102c)以转轴(102b)为轴心环绕设置。
9.如权利要求5所述的深水绞吸清淤机器人,其特征在于:所述连接管(105a)外壁均开设有限位槽,限位杆(103c)一端滑动安装在限位槽内部。
10.如权利要求6所述的深水绞吸清淤机器人,其特征在于:所述分解罐(106b)底部对称开设有一组第一螺纹孔,所述分解罐(106b)顶部开设有第二螺纹孔,所述第一螺纹孔与输送管(105d)螺纹连接,所述第二螺纹孔与吸污管(106a)螺纹连接。
技术总结
本发明公开了深水绞吸清淤机器人,包括承载单元,包括安装组件、设置于安装组件一端的前置破泥组件、设置于安装组件底部的驱动组件、设置于驱动组件底部的后置破泥组件,以及设置于安装组件底部的触底组件,设置于触底组件顶部的吸污组件,以及设置于吸污组件内部的切割组件;安装组件包括机体,与机体转动连接的超声波探测器,以及设置于机体顶部的控制器,前置破泥组件可以对板结的淤泥进行破碎,同时后置破泥组件可以对破碎后的淤泥进行二次破碎,这样可以避免吸污口被体积较大的淤泥堵塞的情况,同时触底组件的设置位于淤泥内,以减少水流进入提高对淤泥的抽吸效率,吸污组件的设置可以对破碎后的淤泥进行吸取。
技术研发人员:李永军,贺秀儒,唐晓丹,钟洪星,陶吉全,赵新益,叶飞,白治朋
受保护的技术使用者:三峡金沙江云川水电开发有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:李永军,贺秀儒,唐晓丹,钟洪星,陶吉全,赵新益,叶飞,白治朋
技术所有人:三峡金沙江云川水电开发有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除