一种无人机的飞行路径规划控制系统、方法及无人机
本发明涉及无人机,尤其涉及一种无人机的飞行路径规划控制系统、方法及无人机。
背景技术:
1、无人驾驶飞行器,简称无人机,是一种使用无线遥控设备和自主程序控制的不载人飞机,或者是由计算机完全或间歇地控制。在民用领域,与载人飞行器相比,无人机由于自身的灵活性、便携性、经济性以及易操作性已经在农业、城管、科研、环保、公安等各个领域都有了广泛的应用。
2、在无人机实际应用过程中,无人机路径规划都属于十分重要的课题。无人机路径规划主要是指在某一场景中,尽可能地减少无人机的使用数量,在较短时间内到达目标位置,提高飞行效率。
3、现有的针对于无人机的飞行路径规划控制系统大多采用dijkstra算法和a*算法等,这些方法能够获取到从初始点到目的地的最短路径,但实施的过程中,必须要事先知道完整的环境信息,导致路径规划的复杂度较高。
技术实现思路
1、本发明提供了一种无人机的飞行路径规划控制系统、方法及无人机,用于解决现有的针对于无人机的飞行路径规划控制系统导致路径规划的复杂度较高的技术问题。
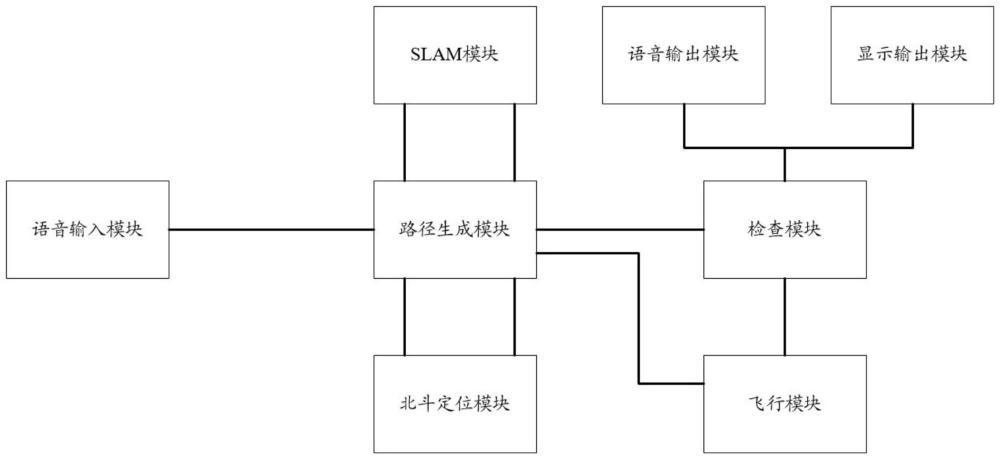
2、本发明第一方面提供的一种无人机的飞行路径规划控制系统,所述系统包括语音输入模块、路径生成模块、采集数据模块;
3、所述路径生成模块分别与所述语音输入模块和所述采集数据模块连接;
4、所述语音输入模块用于,获取用户语音信号,并根据所述用户语音信号,生成用户需求数据后传输至所述路径生成模块;
5、所述路径生成模块,用于当接收到所述用户需求数据时,生成执行指令,并将所述执行指令和所述用户需求数据发送至所述采集数据模块,根据所述用户需求数据、所述采集数据模块发送的无人机运动数据和目标地图特征值,生成无人机飞行路径;
6、所述采集数据模块用于,当接收到所述执行指令和所述用户需求数据时,获取所述无人机运动数据,并根据所述无人机运动数据,计算所述目标地图特征值,将所述无人机运动数据和所述目标地图特征值传输至所述路径生成模块。
7、可选地,所述用户需求数据包括语音需求特征和文本需求特征;所述语音输入模块,具体用于:
8、获取用户语音信号,并对所述用户语音信号进行预处理,输出目标语音数字信号;
9、采用预置语音特征提取技术对所述目标语音数字信号进行信号特征提取,输出语音信号特征;
10、将所述语音信号特征作为预置深度学习模型的输入,输出文本序列;
11、采用语音转换技术对所述文本序列进行语音转换,生成语音需求特征;
12、采用预置命名实体识别模型对所述文本序列进行文本特征提取,生成文本需求特征并传输至所述路径生成模块。
13、可选地,所述无人机运动数据包括目标地点位置、无人机当前时刻位置、二维激光扫描数据、环境图像数据和惯性测量数据;所述采集数据模块包括北斗定位模块和slam模块;
14、所述北斗定位模块和所述slam模块均与所述路径生成模块连接;
15、所述北斗定位模块用于,响应所述执行指令,获取无人机当前时刻位置,并按照所述文本需求特征生成目标地点位置,将所述目标地点位置和所述无人机当前时刻位置传输至所述路径生成模块;
16、所述slam模块用于,响应所述执行指令,获取二维激光扫描数据、环境图像数据和惯性测量数据,并根据所述二维激光扫描数据、所述环境图像数据和所述惯性测量数据,计算目标地图特征值,将所述目标地图特征值传输至所述路径生成模块。
17、可选地,所述slam模块,具体用于:
18、响应所述执行指令,获取二维激光扫描数据、环境图像数据和惯性测量数据;
19、采用预置角点检测算法对所述环境图像数据中的多个像素点进行角点检测,输出各所述像素点的角点像素值;
20、分别比较各所述角点像素值与预置像素阈值;
21、将任一大于所述预置像素阈值的角点像素值对应的像素点作为目标像素点;
22、采用预置图像处理函数组根据各所述目标像素点的梯度幅度,计算各所述目标像素点对应的特征描述子;
23、根据各所述特征描述子,构建特征描述子矩阵;
24、采用预置扩展卡尔曼滤波器函数组根据所述特征描述子矩阵、所述二维激光扫描数据和所述惯性测量数据,计算卡尔曼增益矩阵和状态向量预测值;
25、根据所述状态向量预测值、所述卡尔曼增益矩阵、所述特征描述子矩阵、所述二维激光扫描数据和所述所述惯性测量数据,计算目标地图特征值;
26、根据所述目标地图特征值,计算布尔值,并判断所述布尔值是否为零;
27、若所述布尔值不为零,将所述目标地图特征值传输至所述路径生成模块。
28、可选地,所述文本需求特征包括用户约束条件、无人机初始状态和无人机目标状态;所述路径生成模块,具体用于:
29、对所述无人机当前时刻位置与所述目标地点位置进行一致性比对;
30、若比对不一致,则采用所述用户约束条件,构建无人机领域;
31、基于预置状态更新函数对所述用户约束条件进行更新,确定目标用户约束条件;
32、采用所述目标用户约束条件、所述无人机初始状态、所述无人机目标状态、所述目标地图特征值、所述目标地点位置和所述无人机当前时刻位置,构建无人机问题;
33、根据所述无人机问题和所述无人机领域,生成无人机飞行路径。
34、可选地,所述系统还包括语音输出模块、显示输出模块以及依次连接的检查模块和飞行模块;
35、所述检查模块分别与所述语音输出模块、所述显示输出模块和所述路径生成模块连接;
36、所述语音输出模块与所述语音输入模块通信连接;
37、所述语音输出模块用于接收所述语音输入模块发送的所述语音需求特征,并根据所述语音需求特征进行语音播放;
38、所述显示输出模块用于接收所述检查模块发送的所述无人机飞行路径,并展示所述无人机飞行路径;
39、所述检查模块用于,当接收到所述路径生成模块发送的所述无人机飞行路径时,判断所述无人机飞行路径是否符合预置飞行条件,若所述无人机飞行路径符合所述预置飞行条件,则生成飞行指令,并将所述飞行指令和所述无人机飞行路径传输至所述飞行模块;
40、所述飞行模块用于响应所述飞行指令,控制无人机按照所述无人机飞行路径进行飞行。
41、本发明第二方面提供的一种无人机的飞行路径规划方法,包括:
42、当接收到用户语音信号时,采集无人机运动数据,并根据所述无人机运动数据,计算目标地图特征值;
43、根据所述用户语音信号,生成用户需求数据;
44、根据所述用户需求数据、所述无人机运动数据和所述目标地图特征值,生成无人机飞行路径。
45、本发明第三方面提供的一种无人机,包括无人机机身和螺旋桨对;
46、所述无人机机身的两侧对称设置有所述螺旋桨对;
47、所述无人机机身的顶部设置有语音输入按钮、用户操作屏和地图显示屏;
48、所述无人机机身的底部设置有slam传感器;
49、所述无人机机身内置有控制主板,所述控制主板分别与所述语音输入按钮、所述用户操作屏、所述地图显示屏、所述螺旋桨对和所述slam传感器连接;
50、所述控制主板搭载有如上述所述的无人机的飞行路径规划控制系统。
51、本发明第四方面提供的一种计算机设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述所述的无人机的飞行路径规划方法的步骤。
52、本发明第五方面提供的一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现如上述所述的无人机的飞行路径规划方法。
53、从以上技术方案可以看出,本发明具有以下优点:
54、本发明的上述技术方案第一方面提供了一种无人机的飞行路径规划控制系统,该系统包括语音输入模块、路径生成模块、采集数据模块;路径生成模块分别与语音输入模块和采集数据模块连接;语音输入模块用于,获取用户语音信号,并根据用户语音信号,生成用户需求数据后传输至路径生成模块;路径生成模块,用于当接收到用户需求数据时,生成执行指令,并将执行指令和用户需求数据发送至采集数据模块,根据用户需求数据、采集数据模块发送的无人机运动数据和目标地图特征值,生成无人机飞行路径;采集数据模块用于,当接收到执行指令和用户需求数据时,获取无人机运动数据,并根据无人机运动数据,计算目标地图特征值,将无人机运动数据和目标地图特征值传输至路径生成模块;基于上述方案,通过路径生成模块根据用户需求数据、采集数据模块发送的无人机运动数据和目标地图特征值,生成无人机飞行路径的过程,不需要事先知道完整的环境信息,能够降低路径规划的复杂度。
55、本发明的上述技术方案第二方面提供了一种无人机的飞行路径规划方法,当接收到用户语音信号时,采集无人机运动数据,并根据无人机运动数据,计算目标地图特征值;根据用户语音信号,生成用户需求数据;根据用户需求数据、无人机运动数据和目标地图特征值,生成无人机飞行路径;上述过程不需要事先知道完整的环境信息,能够降低路径规划的复杂度。
56、本发明的上述技术方案第三方面提供了一种无人机,包括无人机机身的两侧对称设置有螺旋桨对;无人机机身的顶部设置有语音输入按钮、用户操作屏和地图显示屏;无人机机身的底部设置有slam传感器;无人机机身内置有控制主板,控制主板分别与语音输入按钮、用户操作屏、地图显示屏、螺旋桨对和slam传感器连接;控制主板搭载有无人机的飞行路径规划控制系统;基于上述方案,无人机基于控制主板搭载的无人机的飞行路径规划控制系统,根据通过语音输入按钮、slam传感器获取的用户语音信号、无人机运动数据,生成无人机飞行路径的过程,不需要事先知道完整的环境信息,能够降低路径规划的复杂度。
技术研发人员:饶东宁,宣铭涛
技术所有人:广东工业大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除