无菌罩转动结构及手术机器人的制作方法
本发明涉及医疗器械,尤其涉及一种无菌罩转动结构及手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。在手术机器人辅助微创外科手术过程中,医生借助细长的微创手术器械实施手术操作任务,并需要将与患者相邻的区域保持在无菌条件下。
2、相关技术中,手术机器人包括主体、第一部件和第二部件。第一部件可以为连接臂,第二部件可以为旋转臂,连接臂与主体活动连接,旋转臂与连接臂转动连接。无菌罩包裹连接臂和旋转臂。无菌罩的一端与主体固定连接,无菌罩的一端与旋转臂固定连接。
3、然而,当手术机器人的连接臂不运动,旋转臂旋转过程中,无菌罩被扭转,导致无菌罩与旋转臂的运动干涉,影响手术机器人的运动。
技术实现思路
1、本发明实施例提供一种无菌罩转动结构及手术机器人,以解决当手术机器人的连接臂不运动,旋转臂旋转过程中,无菌罩被扭转,导致无菌罩与旋转臂的运动干涉,影响手术机器人的运动的问题。
2、第一方面,本发明实施例提供一种无菌罩转动结构,包括第一无菌罩、第二无菌罩、第一连接件和第二连接件;
3、所述第一无菌罩与所述第一连接件固定连接,所述第一无菌罩用于包裹手术机器人的第一部件,所述第一连接件与所述第一部件连接;
4、所述第二无菌罩与所述第二连接件固定连接,所述第二连接件与所述第一连接件转动连接,所述第二无菌罩用于包裹手术机器人的第二部件,所述第二连接件与所述第二部件连接。
5、本发明实施例提供的无菌罩转动结构,通过第一连接件与第二连接件转动连接,使得第一连接件和第二连接件可以相对转动,当手术机器人的第一部件不运动,第二部件旋转过程中,第一连接件和第一无菌罩相对于第一部件保持静止,第一无菌罩不随第二部件运动,第二连接件和第二无菌罩随着第二部件转动,即第二无菌罩与第二部件保持同步运动,从而第一无菌罩和第二无菌罩不与第二部件的运动干涉,消除了无菌罩对手术机器人的运动的影响。
6、在一种可能的实施方式中,所述第一连接件的内部设置有转动槽,所述第二连接件转动设置在所述转动槽中。如此设置,使得第二连接件可以相对于第一连接件转动。
7、在一种可能的实施方式中,在所述第一连接件的轴向上,所述第二连接件与所述转动槽的侧壁之间具有间隙。如此设置,可以减少第二连接件与转动槽的侧壁之间的摩擦,使得第二连接转动顺畅。
8、在一种可能的实施方式中,所述第二连接件设置有环形壁,所述环形壁的轴线与所述第一连接件的轴线重合,所述环形壁与所述第一连接件的内壁接触。如此设置,可以在第一连接件的径向上,对第二连接件进行限位,避免第二连接件在第一连接件的径向产生晃动,从而提高第二连接件转动的稳定性。
9、在一种可能的实施方式中,所述第一无菌罩与所述第一连接件的外壁热贴合。如此设置,通过热贴合方式可以确保第一无菌罩与第一连接件之间的连接处没有缝隙,从而提高第一无菌罩与第一连接件之间的密封性,防止外界污染物进入无菌环境。
10、在一种可能的实施方式中,所述第二无菌罩包括多个罩体,所述第二连接件设置有多个安装口,多个所述罩体与多个所述安装口一一对应,每个所述罩体的一端与对应的所述安装口的侧壁热贴合,每个所述罩体的另一端与隔离板热贴合,所述隔离板与所述第二部件连接。如此设置,通过热贴合方式可以确保第二无菌罩与第二连接件之间的连接处没有缝隙,第二无菌罩与隔离板之间的连接处没有缝隙,从而提高第二无菌罩与第二连接件之间的密封性,以及提高第二无菌罩与隔离板之间的密封性,防止外界污染物进入无菌环境。
11、在一种可能的实施方式中,所述第一连接件与所述第一部件可拆卸连接,所述第二连接件与所述第二部件可拆卸连接。如此设置,使得第一无菌罩通过第一连接件便于与第一部件安装和拆卸,使得第二无菌罩通过第二连接件便于与第二部件安装和拆卸。
12、在一种可能的实施方式中,所述第一连接件的内部设置有多个卡合臂,多个所述卡合臂沿着所述第一连接件的圆周方向间隔设置,多个所述卡合臂卡合在所述第一部件上。如此设置,通过卡合和分离实现第一连接件与第一部件快速安装和拆卸,通过多个卡合臂卡合在第一部件上,可以提供多点支撑和固定,从而增强第一连接件和第一部件之间的稳定性,减少松动或脱落的风险。
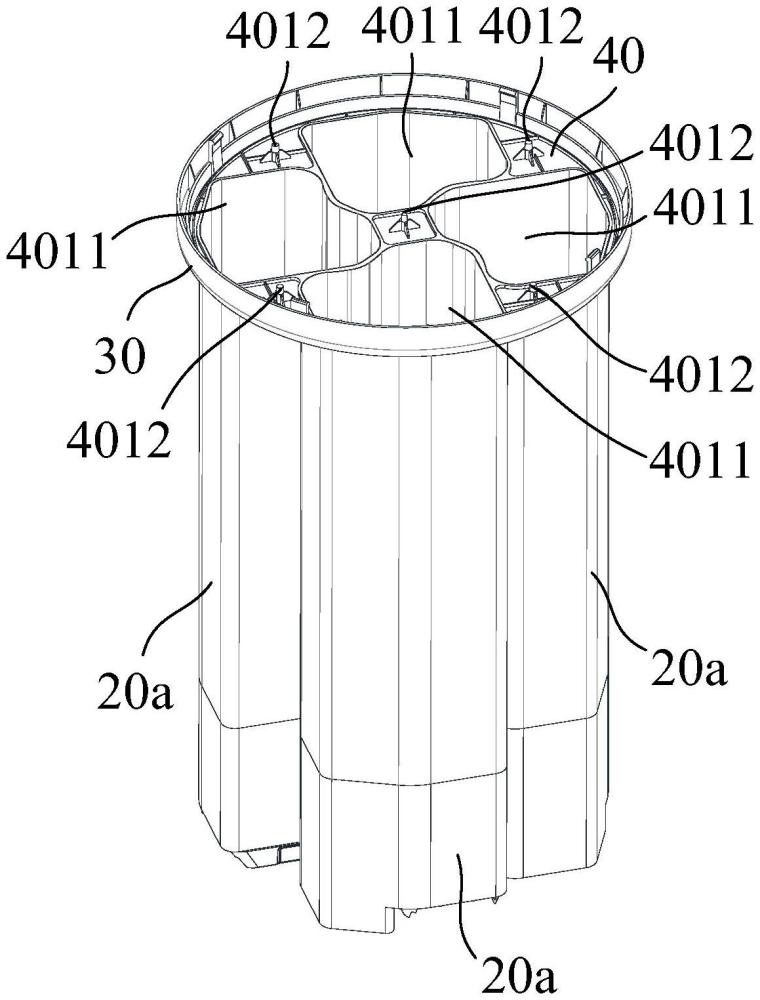
13、在一种可能的实施方式中,所述第二连接件上设置有多个间隔设置的插接凸起,多个所述插接凸起插接在所述第二部件上。如此设置,当第二部件旋转过程中,第二部件可以带动第二连接件转动,使得第二连接件40与第二部件同步转动。
14、第二方面,本发明实施例提供一种手术机器人,包括第一部件、第二部件和如上所述的无菌罩转动结构;
15、所述第二部件与所述第一部件转动连接,所述无菌罩转动结构的第一无菌罩包裹所述第一部件,所述无菌罩转动结构的第一连接件与所述第一部件连接,所述无菌罩转动结构的第二无菌罩包裹所述第二部件,所述无菌罩转动结构的第二连接件与所述第二部件连接。
16、本发明实施例提供的手术机器人,通过第一连接件与第二连接件转动连接,使得第一连接件和第二连接件可以相对转动,当手术机器人的第一部件不运动,第二部件旋转过程中,第一连接件和第一无菌罩相对于第一部件保持静止,第一无菌罩不随第二部件运动,第二连接件和第二无菌罩随着第二部件转动,即第二无菌罩与第二部件保持同步运动,从而第一无菌罩和第二无菌罩不与第二部件的运动干涉,消除了无菌罩对手术机器人的运动的影响。
技术特征:
1.一种无菌罩转动结构,其特征在于,包括第一无菌罩(10)、第二无菌罩(20)、第一连接件(30)和第二连接件(40);
2.根据权利要求1所述的无菌罩转动结构,其特征在于,所述第一连接件(30)的内部设置有转动槽(30a),所述第二连接件(40)转动设置在所述转动槽(30a)中。
3.根据权利要求2所述的无菌罩转动结构,其特征在于,在所述第一连接件(30)的轴向上,所述第二连接件(40)与所述转动槽(30a)的侧壁之间具有间隙。
4.根据权利要求2所述的无菌罩转动结构,其特征在于,所述第二连接件(40)设置有环形壁(402),所述环形壁(402)的轴线与所述第一连接件(30)的轴线重合,所述环形壁(402)与所述第一连接件(30)的内壁接触。
5.根据权利要求2所述的无菌罩转动结构,其特征在于,所述第一无菌罩(10)与所述第一连接件(30)的外壁热贴合。
6.根据权利要求2所述的无菌罩转动结构,其特征在于,所述第二无菌罩(20)包括多个罩体(20a),所述第二连接件(40)设置有多个安装口(4011),多个所述罩体(20a)与多个所述安装口(4011)一一对应,每个所述罩体(20a)的一端与对应的所述安装口(4011)的侧壁热贴合,每个所述罩体(20a)的另一端与隔离板(50)热贴合,所述隔离板(50)与所述第二部件(200)连接。
7.根据权利要求1-6任一项所述的无菌罩转动结构,其特征在于,所述第一连接件(30)与所述第一部件(100)可拆卸连接,所述第二连接件(40)与所述第二部件(200)可拆卸连接。
8.根据权利要求7所述的无菌罩转动结构,其特征在于,所述第一连接件(30)的内部设置有多个卡合臂(302),多个所述卡合臂(302)沿着所述第一连接件(30)的圆周方向间隔设置,多个所述卡合臂(302)卡合在所述第一部件(100)上。
9.根据权利要求7所述的无菌罩转动结构,其特征在于,所述第二连接件(40)上设置有多个间隔设置的插接凸起(4012),多个所述插接凸起(4012)插接在所述第二部件(200)上。
10.一种手术机器人,其特征在于,包括第一部件(100)、第二部件(200)和如权利要求1-9任一项所述的无菌罩转动结构;
技术总结
本发明实施例提供一种无菌罩转动结构及手术机器人,涉及医疗器械技术领域。无菌罩转动结构包括第一无菌罩、第二无菌罩、第一连接件和第二连接件;第一无菌罩与第一连接件固定连接,第一连接件与第一部件连接;第二无菌罩与第二连接件固定连接,第二连接件与第一连接件转动连接,第二连接件与第二部件连接。当手术机器人的第一部件不运动,第二部件旋转过程中,第一连接件和第一无菌罩相对于第一部件保持静止,第一无菌罩不随第二部件运动,第二连接件和第二无菌罩随着第二部件转动,即第二无菌罩与第二部件保持同步运动,从而第一无菌罩和第二无菌罩不与第二部件的运动干涉,消除了无菌罩对手术机器人的运动的影响。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:
技术公布日:2024/12/10
技术研发人员:请求不公布姓名
技术所有人:杭州唯精医疗机器人有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除