一种含有双动平台的五自由度复合驱动并联机构
本发明属于并联机构,具体涉及一种含有双动平台的五自由度复合驱动并联机构。
背景技术:
1、由于并联机构具有刚度大、承载能力强和定位精度高等优点,因此在工业制造领域具有良好的应用前景,特别是在精密加工与制造、手术机器人以及航空航天等方面均能体现出其优异的性能。
2、并联机构的自由度个数通常与主动驱动支链的数目相同,当其自由度大于3时,过多的支链会导致结构复杂并产生支链干涉,并且由于各支链的耦合,使动平台角度偏转较小,因而在实际应用中受到限制。因此设计一种新型五自由度并联机构,在能保证自由度个数的同时,有效减少支链数量,增大动平台转动角度,具有重要的研究价值与广泛的应用前景。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种含有双动平台的五自由度复合驱动并联机构。
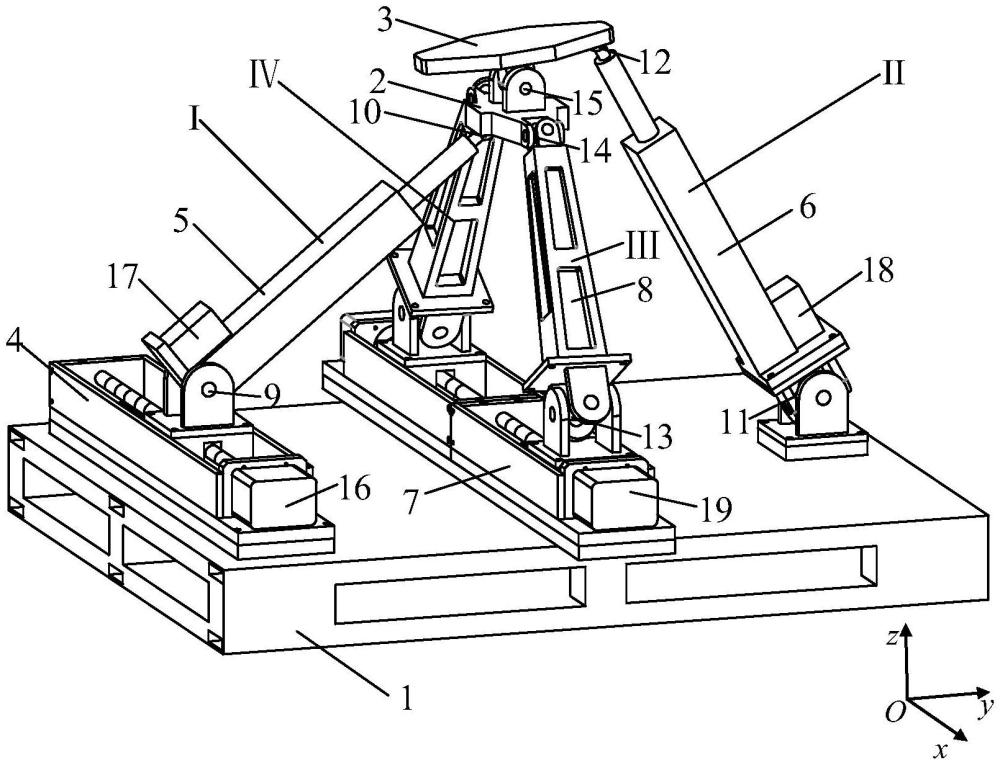
2、为了达到上述目的,本发明提供的含有双动平台的五自由度复合驱动并联机构包括定平台、下动平台、上动平台、第一支链ⅰ、第二支链ⅱ、第三支链ⅲ和第四支链ⅳ;
3、定平台包括底座、第一移动组件支座、第二移动组件支座和第一虎克铰支座;其中第一移动组件支座和第二移动组件支座沿前后方向水平固定在底座的顶面左侧部位和中部;第一虎克铰支座安装在底座的顶面右侧中部;
4、下动平台上设有第二虎克铰支座、第一球铰支座和第一铰接支座;两个第二虎克铰支座设置在下动平台的前后两端,第一球铰支座设置在下动平台的底面一侧,第一铰接支座则固定在下动平台的顶面;上动平台的底面一侧设有第二球铰支座,底面中部设有连接件;下动平台上的第一铰接支座与上动平台上的连接件相铰接而构成第一转动副;
5、第一支链ⅰ为复合驱动支链,包括第一移动组件和第一驱动组件;其中第一移动组件包括第一滑轨、第一丝杠、第一滑块、第二铰接支座和第一电机;其中第一滑轨沿前后方向固定在第一移动组件支座上;第一丝杠以与第一滑轨平行的方式设置在第一滑轨一侧;第一电机固定在第一滑轨的一端外侧,且通过输出轴与第一丝杠的一端相连;第一滑块通过丝杠螺母与第一丝杠相连接,同时通过滑动方式与第一滑轨相连,并且第一滑块的顶面设有第二铰接支座;第一驱动组件包括第一伸缩杆和第二电机;其中,第二电机通过输出轴与第一伸缩杆相连;第一伸缩杆的下端与第二铰接支座相铰接而构成第二转动副,上端设有第一球铰且通过第一球铰与下动平台上的第一球铰支座相连;
6、第二支链ⅱ为第二驱动组件;第二驱动组件包括第二伸缩杆和第三电机;其中第三电机通过输出轴与第二伸缩杆相连;第二伸缩杆的下端通过第一虎克铰与第一虎克铰支座相连,上端设有第二球铰且通过第二球铰与上动平台的第二球铰支座相连;
7、第三支链ⅲ和第四支链ⅳ的结构相同,下端对称设置在第二移动组件支座的前后部位,均包括第二移动组件和定长杆;第二移动组件包括第二滑轨、第二丝杠、第二滑块、第三虎克铰支座和第四电机;其中第二滑轨固定在第二移动组件支座的前部或后部;第二丝杠以与第二滑轨平行的方式设置在第二滑轨一侧;第四电机固定在第二滑轨的一端外侧,且通过输出轴与第二丝杠的一端相连;第二滑块通过丝杠螺母与第二丝杠相连接,同时通过滑动方式与第二滑轨相连,并且第二滑块的顶面设有第三虎克铰支座;定长杆的上端通过第二虎克铰与下动平台上的一个第二虎克铰支座相连,下端通过第三虎克铰与第三虎克铰支座相接。
8、所述下动平台和上动平台均为板状结构。
9、所述定长杆上设有减重孔。
10、与现有技术相比,本发明优点是:
11、1、第一移动组件和第一驱动组件实现支链的复合驱动,在保证自由度个数的基础上,能够减少支链数量,降低支链之间的干涉。
12、2、采用双动平台设计,有效增大了动平台转动角度,并且绕x轴转动可单独控制。
13、3、并联机构所有驱动均为线性驱动,具有高精度、易控制的优点。
技术特征:
1.一种含有双动平台的五自由度复合驱动并联机构,其特征在于:所述含有双动平台的五自由度复合驱动并联机构包括定平台(1)、下动平台(2)、上动平台(3)、第一支链ⅰ、第二支链ⅱ、第三支链ⅲ和第四支链ⅳ;
2.根据权利要求1所述的含有双动平台的五自由度复合驱动并联机构,其特征在于:所述下动平台(2)和上动平台(3)均为板状结构。
3.根据权利要求1所述的含有双动平台的五自由度复合驱动并联机构,其特征在于:所述定长杆(8)上设有减重孔。
技术总结
本发明公开了一种含有双动平台的五自由度复合驱动并联机构,包括定平台、下动平台、上动平台、第一支链、第二支链、第三支链和第四支链,其中第一支链为复合驱动支链;本发明优点为:第一移动组件和第一驱动组件实现支链的复合驱动,在保证自由度个数的基础上,减少支链数量,降低支链之间的干涉;采用双动平台设计,有效增大了动平台转动角度,并且绕x轴转动可单独控制;并联机构所有驱动均为线性驱动,具有高精度、易控制的优点。
技术研发人员:吴孟丽,史旭升,王旭浩,李冠昊,曹轶然
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/11/18
技术研发人员:吴孟丽,史旭升,王旭浩,李冠昊,曹轶然
技术所有人:中国民航大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除